Cet article explique ce qu'est le vecteur position en physique. Ainsi, vous découvrirez quelles sont les propriétés du vecteur position, comment calculer le vecteur position d'un point et, également, un exemple concret étape par étape.
Qu'est-ce qu'un vecteur de position ?
Un vecteur de position , ou simplement un vecteur de position , est un vecteur qui décrit la position d'un point par rapport à un système de référence. Autrement dit, le vecteur position est utilisé pour indiquer la position d'un point dans un système de coordonnées.
Mathématiquement, le vecteur position d'un point est défini comme le vecteur qui va de l'origine des coordonnées à ce point. Par conséquent, le vecteur position d’un point est calculé en soustrayant les coordonnées de ce point moins l’origine des coordonnées.

En général, le vecteur position est exprimé par les vecteurs unitaires  ,
,  et
et ![\vv{k}[/latex ] , qui correspondent respectivement aux coordonnées des axes X, Y et Z. Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k. <figure class="wp-block-image aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png" alt="vecteur de position" class="wp-image-7644" width="374" height="308" srcset="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position-300x247.png 300w, https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png 697w" sizes="(max-width: 300px) 100vw, 300px"></figure><h2 class="wp-block-heading"><span class="ez-toc-section" id="Caracteristicas-del-vector-de-posicion"></span> Caractéristiques du vecteur de position<span class="ez-toc-section-end"></span></h2> Maintenant que nous connaissons la définition du vecteur position, voyons quelles sont ses caractéristiques.<ul style="color:#4fd12f; font-weight: bold;"><li style="margin-bottom:20px"> <span style="color:#101010;font-weight: normal;">Le vecteur position d'un point est défini comme la différence entre les coordonnées de ce point et l'origine des coordonnées. Par conséquent, la formule pour calculer le vecteur position d'un point est la suivante :</span></li> [latex]\vv{r}=PO](https://physigeek.com/wp-content/ql-cache/quicklatex.com-493ea824d13cdf2c289249ee201f0079_l3.png "Rendered by QuickLaTeX.com")
, et ![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ.</span></li> [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9a41deb220b0257eea947e8a946f9a2f_l3.png "Rendered by QuickLaTeX.com")

Notez que le vecteur position n'aura que deux coordonnées (x,y) si l'on travaille dans le plan. En revanche, si l'on travaille dans l'espace, le vecteur position aura trois coordonnées (x,y,z).
Exercice de vecteur de position résolu
Pour bien comprendre le concept, vous trouverez ci-dessous un exercice résolu sur la façon dont le vecteur de position est calculé.
- Le vecteur position en fonction du temps d'un corps est défini par l'expression ci-dessous. Calculez le vecteur position du corps au temps t=3 s et son module.

Pour trouver le vecteur position au temps t=3 s il faut remplacer le paramètre t par sa valeur et faire les calculs :
![\begin{aligned}\vv{r}(3)&=4\cdot 3\vv{i}+2\cdot 3^2\vv{j}+5 \vv{k}\\[2ex ]\vv{r}(3)&=12\vv{i}+18\vv{j}+5\vv{k}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-dec24ff071b35d8e731e7a0a66d6c0e0_l3.png "Rendered by QuickLaTeX.com")
Puis on sort le module du vecteur position en calculant la racine carrée de la somme des carrés des coordonnées :
![\begin{aligned}|\vv{r}(3)|&=\sqrt{12^2+18^2+5^2}\\[2ex]|\vv{r}(3)| &=\sqrt{493}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-8c09dc9fc6db4d03b23adfc1b44c8168_l3.png "Rendered by QuickLaTeX.com")
Vecteur de position et de déplacement
Le décalage d'un point est défini comme la distance entre le point final et le point de départ. Par conséquent, le vecteur déplacement est le vecteur obtenu en soustrayant le vecteur position finale moins le vecteur position initiale.

Par conséquent, la différence entre le vecteur position et le déplacement est que le vecteur position indique la position d'un corps à un instant donné, par contre, le vecteur déplacement indique la distance entre deux positions différentes d'un corps en mouvement.
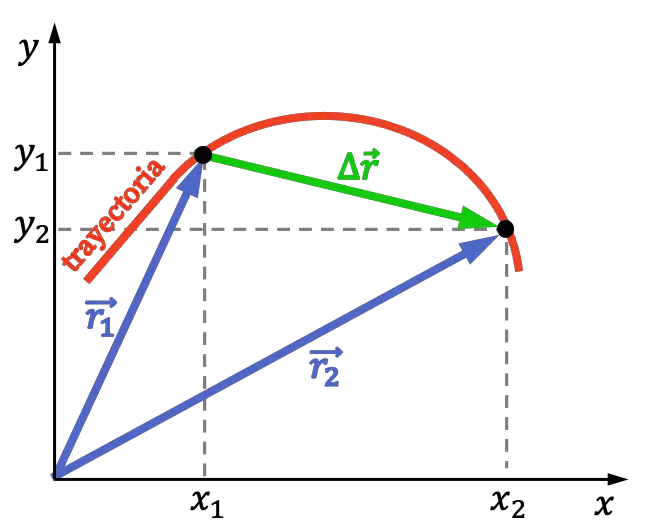
De même, le déplacement du tracé doit être différencié. Le chemin fait référence à la longueur totale du chemin parcouru, tandis que le déplacement fait référence à la distance entre la position finale et la position finale. Le chemin peut donc être plus grand que le décalage.