Cet article explique quelle est la position en physique. Ainsi, vous découvrirez la signification de la position en physique, la façon dont elle est calculée et la relation de la position avec d'autres concepts physiques.
Qu'est-ce que la position en physique ?
En physique, la position d'un corps ou d'une particule est l'endroit où il se trouve à un instant donné. Autrement dit, en physique, la position d'un corps est utilisée pour localiser un corps dans un système de coordonnées.
De plus, en physique, la position est utilisée pour décrire le mouvement d'un corps. En représentant la position d'un corps avec un système de coordonnées, sa position est définie par des nombres et, par conséquent, le changement de position du corps peut être défini.
Ainsi, en physique, la position d’un corps est représentée par un vecteur appelé vecteur position. Dans la section suivante, nous verrons en quoi consiste le vecteur position.
Vecteur de position
Le vecteur de position , ou simplement vecteur de position , est un vecteur qui décrit la position d'un point dans un système de référence, c'est-à-dire que le vecteur de position sert à indiquer la position d'un point dans un système de coordonnées.
Mathématiquement, le vecteur position d'un point est défini comme le vecteur qui va de l'origine des coordonnées à ce point. Par conséquent, le vecteur position d’un point est calculé en soustrayant les coordonnées de ce point moins l’origine des coordonnées. La formule du vecteur position est donc la suivante :

Où  est le point auquel le vecteur de position est calculé et
est le point auquel le vecteur de position est calculé et  est l'origine des coordonnées du système de référence.
est l'origine des coordonnées du système de référence.
Les coordonnées du vecteur position d'un point sont exprimées par les vecteurs unitaires  ,
,  et
et ![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ. [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-c04df108648dbd0ef793690ce20b8b96_l3.png "Rendered by QuickLaTeX.com")
Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k.
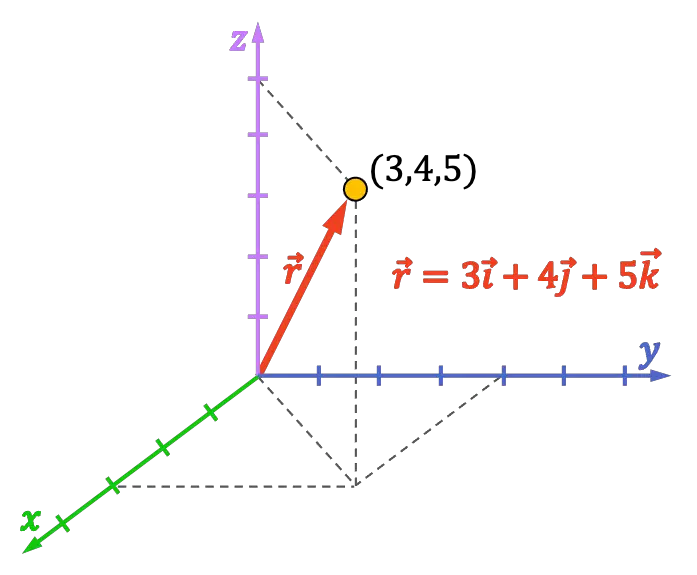
Comme vous pouvez le voir dans l'exemple précédent, la direction du vecteur position est la ligne qui relie l'origine du système de référence au point en question et, d'autre part, la direction du vecteur position va de l'origine au point en question. point d'étude.
L'amplitude du vecteur position d'un point est la distance entre le point et l'origine des coordonnées. Ainsi, la norme du vecteur position est égale à la racine carrée de la somme des carrés de ses coordonnées.

Notez que le vecteur position n'aura que deux coordonnées (x,y) si l'on travaille dans le plan. En revanche, si l'on travaille dans l'espace, le vecteur position aura trois coordonnées (x,y,z).
position et décalage
Dans cette section, nous verrons ce qu'est le déplacement en physique et quelle est sa relation par rapport à la position d'un corps.
En physique, le déplacement fait référence au changement de position d'un corps ou d'un objet. Autrement dit, le déplacement d’un corps est calculé en soustrayant sa position finale moins sa position initiale. La formule pour calculer le déplacement est donc la suivante :

Où:
-
 est le décalage du vecteur de position.
est le décalage du vecteur de position. -
 est le vecteur position de la position finale.
est le vecteur position de la position finale. -
 est le vecteur position de la position initiale.
est le vecteur position de la position initiale.
Position et distance
En physique, la distance entre deux points est la norme du vecteur qui relie les points. Par conséquent, la distance entre deux points peut être déterminée en calculant la grandeur du vecteur de déplacement entre les points, puisque le vecteur de déplacement est le vecteur qui joint deux positions différentes.
![d_{AB}=|\Delta \vv{r}_{AB}|=\sqrt{(x_B-x_A)^2+(y_B-y_A)^2(z_B-z_A)^2}[/ latex] Où:<ul style="color:#4fd12f; font-weight: bold;"><li style="margin-bottom:5px"> <span style="color:#101010;font-weight: normal;">[latex]d_{AB}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-75dc5dcfde010c68a3d5e0d59fc3f5b9_l3.png "Rendered by QuickLaTeX.com") est la distance entre le point A et le point B.
est la distance entre le point A et le point B.
 est le vecteur déplacement entre le point A et le point B.
est le vecteur déplacement entre le point A et le point B. sont les coordonnées X, Y et Z du point A.
sont les coordonnées X, Y et Z du point A. sont les coordonnées X, Y et Z du point B.
sont les coordonnées X, Y et Z du point B.Cependant, la notion de distance entre deux points et la notion de distance parcourue doivent être différenciées, puisqu'il s'agit de distances différentes.
La distance parcourue fait référence à la longueur parcourue par un corps pour se rendre d'un point à un autre, c'est-à-dire que la distance parcourue correspond à l'ensemble du chemin parcouru par le corps.
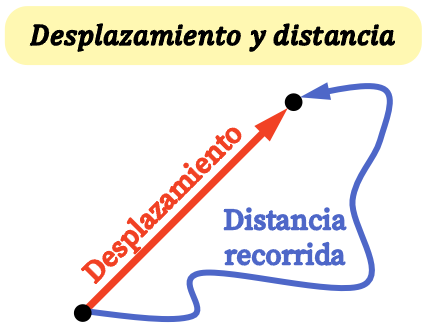
Par conséquent, la différence entre la distance parcourue et la distance entre deux points est que la distance parcourue est la longueur de tout le chemin parcouru, tandis que la distance entre deux points est la distance entre la position finale et la position initiale, ce qui équivaut à le module de déplacement.
Position et vitesse
Pour finir, nous verrons quelle est la relation entre la position d'un corps et sa vitesse, puisque la vitesse d'un corps peut être calculée à partir de son équation de position.
Comme nous l'avons vu plus haut, le vecteur position est un vecteur qui nous indique les coordonnées d'un corps à un instant précis.

L'équation de la position instantanée d'un corps en fonction du temps est une formule qui permet de déterminer la position d'un corps à tout instant :

Ainsi, l'équation de la vitesse instantanée d'un corps est égale à la dérivée temporelle de l'équation de la position instantanée :
*** QuickLaTeX cannot compile formula:
\begin{aligned}\vv{v}(t)&=\cfrac{d\vv{r}(t)}{dt}\\[2ex]\vv{v}(t)&=\ cfrac{dx(t)}{dt}\vv{i}+\cfrac{dy(t)}{dt}\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ fin{aligné}
*** Error message:
Package amsmath Error: \begin{aligned} allowed only in math mode.
leading text: \begin{aligned}\vv
Missing $ inserted.
leading text: \begin{aligned}\vv
Undefined control sequence \vv.
leading text: \begin{aligned}\vv
Please use \mathaccent for accents in math mode.
leading text: ...\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ fin{aligné
Missing $ inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing \cr inserted.
leading text: \end{document}
Missing { inserted.
leading text: \end{document}
Missing $ inserted.
leading text: \end{document}
\begin{aligned} on input line 8 ended by \end{document}.
leading text: \end{document}
You can't use `\end' in internal vertical mode.
Par conséquent, pour calculer la vitesse instantanée d’un corps à un instant précis, nous devons d’abord dériver l’équation de sa position et ensuite substituer la valeur de l’instant du temps dans l’expression obtenue.