Questo articolo spiega quali sono i meccanismi e a cosa servono. Troverai quindi il significato di meccanismo, esempi di meccanismi e quali sono le diverse tipologie di meccanismi.
Cos’è un meccanismo?
Un meccanismo è un insieme di elementi meccanici che consentono all’uomo di svolgere un lavoro con meno sforzo e più comodamente.
Più precisamente i meccanismi sono dispositivi che, grazie ad un sistema di trasmissione, trasformano una forza o un movimento.
La funzione di un meccanismo è quindi quella di facilitare il lavoro degli esseri umani, poiché i meccanismi vengono utilizzati per produrre forze o movimenti che senza di essi sarebbero molto difficili o addirittura impossibili.

Ad esempio, il sistema di meccanismi di un’auto le consente di andare avanti premendo l’acceleratore e spostando la leva del cambio. Pertanto, il meccanismo del veicolo trasforma il lavoro svolto dall’essere umano in movimento in avanti.
In breve, un meccanismo è un insieme di parti di una macchina che trasforma una forza o movimento in ingresso in una forza o movimento in uscita desiderato.
Esempi di meccanismi
Una volta vista la definizione del meccanismo, vedremo diversi esempi di meccanismi per comprendere meglio il concetto.
- Meccanismo biella-manovella : meccanismo utilizzato per trasformare un movimento lineare in un movimento circolare e viceversa.
- Meccanismo seguicamma : meccanismo non reversibile che converte il movimento rotatorio in movimento lineare oscillatorio.
- Meccanismo a vite senza fine : meccanismo utilizzato per trasmettere un movimento rotatorio tra due assi perpendicolari.
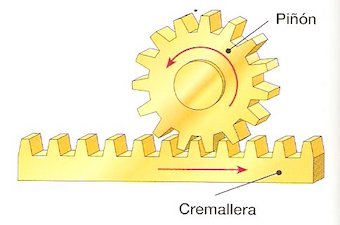
- Meccanismo a pignone e cremagliera : meccanismo reversibile che consente di passare dal movimento circolare al movimento lineare.
- Ruote di frizione : meccanismo che trasmette un movimento rotatorio per attrito.
- Paranco : meccanismo formato da un insieme di pulegge che permette di movimentare comodamente oggetti pesanti.
- Pignoni : meccanismo utilizzato per trasmettere velocità angolare e potenza tra due assi.
Tipi di meccanismi
Meccanismo di trasmissione lineare
I meccanismi di trasmissione lineare sono quei meccanismi che applicano il movimento lineare e, in risposta, generano un altro movimento lineare. Questo tipo di meccanismo trasmette quindi un movimento rettilineo.
Ad esempio, la leva è un meccanismo di trasmissione lineare perché il suo funzionamento consiste nello spostare una delle sue estremità verso il basso (movimento lineare) e, quindi, l’altro braccio della leva con il carico si sposta verso l’alto (movimento lineare). Si tratta quindi di un meccanismo che trasmette un movimento lineare.
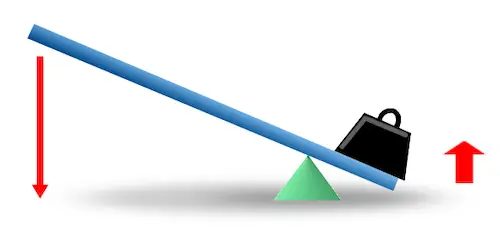
In generale questo tipo di meccanismo permette di modificare la forza in ingresso, permettendo così di esercitare una forza molto maggiore di quella applicata. Seguendo l’esempio precedente, una bilancia consente di sollevare un oggetto pesante con una forza minore rispetto a quella che si avrebbe se si dovesse sollevare il peso senza uno strumento meccanico.
Meccanismo di trasmissione circolare
I meccanismi di trasmissione circolare sono quei meccanismi che hanno un movimento circolare in ingresso e che hanno anche un movimento circolare in uscita. Quindi questo tipo di meccanismo trasmette un movimento rotatorio.
Quindi la differenza tra un meccanismo di azionamento circolare e un meccanismo di azionamento lineare è semplicemente il tipo di movimento che trasmettono. Un meccanismo di trasmissione circolare trasmette il movimento rotatorio, mentre un meccanismo di trasmissione lineare trasmette il movimento rettilineo.
Ad esempio, un sistema di pulegge collegate da una cinghia è un meccanismo di trasmissione circolare, poiché il movimento rotatorio della puleggia di ingresso viene trasferito alla puleggia di uscita.

Questo tipo di meccanismo ha la funzione di modificare la velocità angolare, in modo che durante la trasmissione del movimento circolare, la velocità di rotazione venga aumentata o ridotta a seconda dei casi.
Per fare questo giochiamo con il diametro della ruota di ingresso e il diametro della ruota di uscita: se il diametro di ingresso è maggiore del diametro di uscita, la velocità angolare aumenta, invece, se il diametro di ingresso è inferiore rispetto al diametro di uscita, la velocità angolare è ridotta.
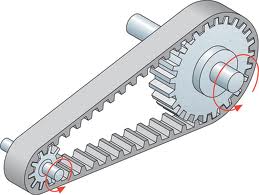
Anche i pignoni con catena, detti meccanismo catena-pignone, sono un meccanismo di trasmissione circolare. Il vantaggio delle catene è che sono più efficienti, tuttavia sono meno flessibili dei nastri.
Infine, gli ingranaggi sono anche meccanismi di trasmissione circolare, poiché sono ruote dentate i cui denti si incastrano e, quindi, il movimento circolare viene trasmesso da una ruota all’altra.
Esistono principalmente tre tipi di ingranaggi: ingranaggi diritti i cui assi sono paralleli, ingranaggi conici i cui assi sono perpendicolari e ingranaggi elicoidali i cui denti sono elicoidali.
ingranaggi cilindrici

ingranaggi conici

ingranaggi elicoidali

Meccanismo di trasformazione del movimento
I meccanismi di trasformazione del movimento convertono il movimento di input in un altro tipo di movimento, quindi il movimento di input e il movimento di output sono diversi.
Fondamentalmente, questi tipi di meccanismi trasformano il movimento circolare in movimento lineare o, al contrario, convertono il movimento circolare in movimento lineare.
Ad esempio, il meccanismo del seguicamma viene utilizzato per trasformare un movimento circolare in un movimento lineare alternativo. Questo tipo di meccanismo è irreversibile, ciò significa che permette di passare dal movimento circolare al movimento lineare, ma non il contrario.
Allo stesso modo, il meccanismo a pignone e cremagliera viene utilizzato per convertire il movimento in avanti in movimento rotatorio. Questo tipo di meccanismo è reversibile, quindi permette anche di trasformare un movimento circolare in un movimento lineare.
Vantaggio meccanico di un meccanismo
Il vantaggio meccanico di un meccanismo è il rapporto tra la forza in uscita e la forza in ingresso del meccanismo. Pertanto, il vantaggio meccanico è uguale al rapporto tra la forza in uscita e la forza in ingresso.
Quindi la formula per calcolare il vantaggio meccanico di un meccanismo è la seguente:

Il vantaggio meccanico di un meccanismo può essere calcolato anche dividendo la velocità della forza applicata per la velocità con cui si muove il carico. Allo stesso modo, questa espressione equivale anche allo spostamento del punto della forza applicata diviso per lo spostamento del carico:

Oro:
-

è il vantaggio meccanico.
-

è la forza di uscita.
-

è la forza in ingresso.
-

è la velocità di ingresso.
-

è la velocità di uscita.
-

è la distanza percorsa dall’ingresso.
-

è la distanza percorsa dall’output.
Se invece vogliamo trasmettere un momento anziché una forza, il vantaggio meccanico si calcola dividendo il momento in uscita per il momento in ingresso. Ad esempio, il vantaggio meccanico delle ruote dentate è misurato dal rapporto del momento trasmesso.

Oro:
-
è il vantaggio meccanico.
-

è il momento del rilascio.
-

è l’orario di ingresso.
-

è la velocità angolare in ingresso.
-

è la velocità angolare di uscita.
Dalla formula del vantaggio meccanico si possono quindi dedurre le seguenti relazioni:
- VM>1 : la forza in uscita è maggiore della forza applicata, quindi il meccanismo aumenta l’entità della forza. D’altra parte, la distanza percorsa dal carico è inferiore alla distanza percorsa dal punto in cui viene applicata la forza.
- VM<1 : la forza in uscita è inferiore alla forza applicata, quindi il meccanismo riduce il valore della forza. Si ottiene però uno spostamento del carico maggiore dello spostamento effettuato nel punto di applicazione della forza.
- VM=1 : la forza in uscita dal meccanismo è pari alla forza esercitata su di esso. Anche gli spostamenti del carico e il punto di applicazione della forza sono identici. Sebbene questi tipi di meccanismi non forniscano alcun vantaggio meccanico, vengono spesso utilizzati per esercitare la forza in modo più confortevole. Ad esempio, una semplice puleggia consente alla forza verso il basso di sollevare un peso, facilitando il sollevamento del carico.
Gradi di libertà di un meccanismo
I gradi di libertà di un meccanismo sono il numero di velocità generalizzate necessarie per definire completamente lo stato cinematico di un meccanismo.
Pertanto, il numero di gradi di libertà di un meccanismo viene calcolato utilizzando la seguente formula:

Oro:
-

è il numero di gradi di libertà del meccanismo.
-

è il numero di solidi o elementi che compongono il meccanismo.
-

è il numero di gradi di libertà di ciascun solido. Se studiamo il meccanismo in due dimensioni ogni solido ha 3 gradi di libertà, ma se lavoriamo in tre dimensioni ogni solido ha 6 gradi di libertà.
-

è il numero di vincoli imposti dal collegamento k .
È bene notare che i gradi di libertà di un meccanismo sono un parametro importante per definirne il moto, perché coincidono con il numero di equazioni necessarie per descriverne il moto.