Dieser Artikel erklärt, welche Position in der Physik einnimmt. So lernen Sie die Bedeutung der Position in der Physik kennen, wie sie berechnet wird und welche Beziehung die Position zu anderen physikalischen Konzepten hat.
Was ist Position in der Physik?
In der Physik gibt die Position eines Körpers oder Teilchens an, wo es sich zu einem bestimmten Zeitpunkt befindet. Das heißt, in der Physik wird die Position eines Körpers verwendet, um einen Körper in einem Koordinatensystem zu lokalisieren.
Darüber hinaus wird in der Physik die Position verwendet, um die Bewegung eines Körpers zu beschreiben. Durch die Darstellung der Position eines Körpers mit einem Koordinatensystem wird seine Position durch Zahlen definiert und somit kann die Positionsänderung des Körpers definiert werden.
In der Physik wird die Position eines Körpers durch einen Vektor dargestellt, der als Positionsvektor bezeichnet wird. Im nächsten Abschnitt werden wir sehen, woraus der Ortsvektor besteht.
Positionsvektor
Der Positionsvektor , oder einfach Positionsvektor , ist ein Vektor, der die Position eines Punktes in einem Bezugssystem beschreibt, d. h. der Positionsvektor wird verwendet, um die Position eines Punktes in einem Koordinatensystem anzugeben.
Mathematisch ist der Positionsvektor eines Punktes als der Vektor definiert, der vom Koordinatenursprung zu diesem Punkt verläuft. Daher wird der Positionsvektor eines Punktes berechnet, indem die Koordinaten dieses Punktes abzüglich der Ursprungskoordinaten subtrahiert werden. Die Formel für den Ortsvektor lautet daher wie folgt:

Gold

ist der Punkt, an dem der Positionsvektor berechnet wird und

ist der Koordinatenursprung des Bezugssystems.
Die Koordinaten des Ortsvektors eines Punktes werden durch die Einheitsvektoren ausgedrückt

,

Und
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ. [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-c04df108648dbd0ef793690ce20b8b96_l3.png "Rendered by QuickLaTeX.com")
Wenn beispielsweise die kartesischen Koordinaten eines Punktes (3,4,5) sind, ist der Positionsvektor dieses Punktes r=3i+4j+5k.
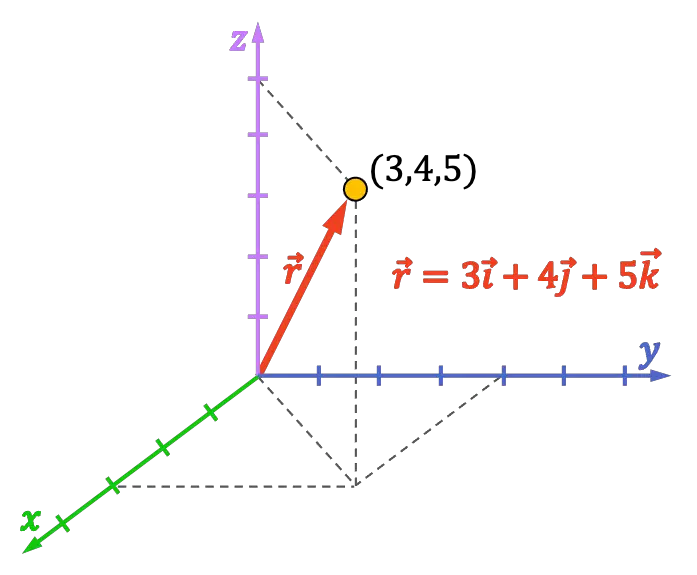
Wie Sie im vorherigen Beispiel sehen können, ist die Richtung des Positionsvektors die Linie, die den Ursprung des Bezugssystems mit dem betreffenden Punkt verbindet, und andererseits geht die Richtung des Positionsvektors vom Ursprung zum Punkt fraglich. Punkt des Studiums.
Der Betrag des Ortsvektors eines Punktes ist der Abstand zwischen dem Punkt und dem Koordinatenursprung. Somit ist die Norm des Ortsvektors gleich der Quadratwurzel der Summe der Quadrate seiner Koordinaten.

Beachten Sie, dass der Positionsvektor nur zwei Koordinaten (x,y) hat, wenn wir in der Ebene arbeiten. Wenn wir andererseits im Raum arbeiten, hat der Positionsvektor drei Koordinaten (x,y,z).
Position und Offset
In diesem Abschnitt werden wir sehen, was Verschiebung in der Physik ist und wie sie mit der Position eines Körpers zusammenhängt.
Unter Verschiebung versteht man in der Physik die Positionsänderung eines Körpers oder Objekts. Mit anderen Worten: Die Verschiebung eines Körpers wird durch Subtrahieren seiner Endposition minus seiner Anfangsposition berechnet. Die Formel zur Berechnung der Verschiebung lautet daher wie folgt:

Gold:
-

ist der Offset des Positionsvektors.
-

ist der Positionsvektor der Endposition.
-

ist der Ortsvektor der Anfangsposition.
Position und Entfernung
In der Physik ist der Abstand zwischen zwei Punkten die Norm des Vektors, der die Punkte verbindet. Daher kann der Abstand zwischen zwei Punkten durch Berechnen der Größe des Verschiebungsvektors zwischen den Punkten bestimmt werden, da der Verschiebungsvektor der Vektor ist, der zwei verschiedene Positionen verbindet.
![d_{AB}=|\Delta \vv{r}_{AB}|=\sqrt{(x_B-x_A)^2+(y_B-y_A)^2(z_B-z_A)^2}[/ latex] Où:
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:5px"> <span style="color:#101010;font-weight: normal;">[latex]d_{AB}“ title=“Rendered by QuickLaTeX.com“ height=“87″ width=“582″ style=“vertical-align: -5px;“></p>
<p> ist der Abstand zwischen Punkt A und Punkt B. </p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-75dc5dcfde010c68a3d5e0d59fc3f5b9_l3.png)

ist der Verschiebungsvektor zwischen Punkt A und Punkt B.

sind die X-, Y- und Z-Koordinaten des Punktes A.

sind die X-, Y- und Z-Koordinaten von Punkt B.
Allerdings muss zwischen dem Begriff der Distanz zwischen zwei Punkten und dem Begriff der zurückgelegten Distanz unterschieden werden, da es sich um unterschiedliche Distanzen handelt.
Unter der zurückgelegten Strecke versteht man die Länge, die ein Körper zurücklegt, um von einem Punkt zum anderen zu gelangen, d. h. die zurückgelegte Strecke ist der gesamte Weg, den der Körper zurücklegt.
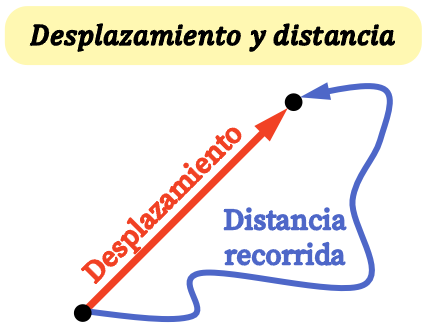
Daher besteht der Unterschied zwischen der zurückgelegten Strecke und der Entfernung zwischen zwei Punkten darin, dass die zurückgelegte Strecke die Länge des gesamten zurückgelegten Weges ist, während die Entfernung zwischen zwei Punkten die Entfernung zwischen der Endposition und der Anfangsposition ist, was äquivalent ist der Verschiebungsmodul.
Position und Geschwindigkeit
Abschließend werden wir sehen, welche Beziehung zwischen der Position eines Körpers und seiner Geschwindigkeit besteht, da die Geschwindigkeit eines Körpers aus seiner Positionsgleichung berechnet werden kann.
Wie wir oben gesehen haben, ist der Positionsvektor ein Vektor, der uns die Koordinaten eines Körpers zu einem bestimmten Zeitpunkt angibt.

Die Gleichung der momentanen Position eines Körpers als Funktion der Zeit ist eine Formel, die es uns ermöglicht, die Position eines Körpers zu jedem Zeitpunkt zu bestimmen:

Somit ist die Gleichung für die momentane Geschwindigkeit eines Körpers gleich der zeitlichen Ableitung der Gleichung für die momentane Position:
*** QuickLaTeX cannot compile formula:
\begin{aligned}\vv{v}(t)&=\cfrac{d\vv{r}(t)}{dt}\\[2ex]\vv{v}(t)&=\ cfrac{dx (t)}{dt}\vv{i}+\cfrac{dy(t)}{dt}\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ end{aligned }
*** Error message:
Package amsmath Error: \begin{aligned} allowed only in math mode.
leading text: \begin{aligned}\vv
Missing $ inserted.
leading text: \begin{aligned}\vv
Undefined control sequence \vv.
leading text: \begin{aligned}\vv
Please use \mathaccent for accents in math mode.
leading text: ...\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ end{aligned
Missing $ inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing \cr inserted.
leading text: \end{document}
Missing { inserted.
leading text: \end{document}
Missing $ inserted.
leading text: \end{document}
\begin{aligned} on input line 8 ended by \end{document}.
leading text: \end{document}
You can't use `\end' in internal vertical mode.
Um die momentane Geschwindigkeit eines Körpers zu einem bestimmten Zeitpunkt zu berechnen, müssen wir daher zunächst die Gleichung seiner Position ableiten und dann den Wert des Zeitpunkts in den resultierenden Ausdruck einsetzen.