Bu makalede mekanizmaların ne olduğu ve ne için kullanıldığı açıklanmaktadır. Bu nedenle mekanizmanın anlamını, mekanizma örneklerini ve farklı mekanizma türlerinin neler olduğunu bulacaksınız.
Mekanizma nedir?
Mekanizma , insanların işi daha az eforla ve daha rahat bir şekilde yapmalarını sağlayan bir dizi mekanik unsurdur.
Daha doğrusu mekanizmalar, bir iletim sistemi sayesinde bir kuvveti veya hareketi dönüştüren cihazlardır.
Bu nedenle bir mekanizmanın işlevi insanın işini kolaylaştırmaktır, çünkü mekanizmalar onlar olmadan çok zor, hatta imkansız olacak kuvvetleri veya hareketleri üretmek için kullanılır.

Örneğin bir arabanın mekanizma sistemi, gaza basıp vites kolunu hareket ettirerek arabanın ileri doğru hareket etmesine olanak sağlar. Böylece araç mekanizması insanın yaptığı işi ileri harekete dönüştürür.
Kısaca mekanizma, bir giriş kuvvetini veya hareketini istenen çıkış kuvvetine veya hareketine dönüştüren bir makinenin parçaları kümesidir.
Mekanizma örnekleri
Mekanizmanın tanımını gördükten sonra kavramı daha iyi anlamak için birkaç mekanizma örneği göreceğiz.
- Biyel kolu-krank mekanizması : Doğrusal bir hareketi dairesel bir harekete dönüştürmek için kullanılan mekanizma veya tam tersi.
- Kam Takip Mekanizması : Dönme hareketini salınımlı doğrusal harekete dönüştüren, geri dönüşü olmayan bir mekanizmadır.
- Solucan mekanizması : İki dik eksen arasındaki dönme hareketini iletmek için kullanılan mekanizma.
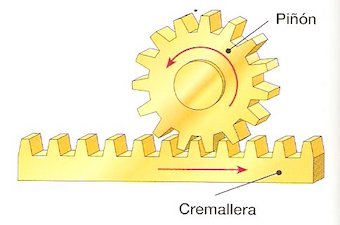
- Kremayer ve pinyon mekanizması : Dairesel hareketten doğrusal harekete geçmenizi sağlayan ters çevrilebilir mekanizma.
- Sürtünme tekerlekleri : Dönme hareketini sürtünme yoluyla ileten mekanizma.
- Vinç : Ağır nesnelerin rahatça taşınmasını sağlayan bir dizi makaradan oluşan mekanizma.
- Dişliler : İki aks arasında açısal hız ve gücü iletmek için kullanılan bir mekanizma.
Mekanizma türleri
Doğrusal aktarım mekanizması
Doğrusal aktarım mekanizmaları, doğrusal hareket uygulayan ve buna yanıt olarak başka bir doğrusal hareket üreten mekanizmalardır. Dolayısıyla bu tip mekanizma doğrusal bir hareket iletir.
Örneğin, kaldıraç doğrusal bir aktarım mekanizmasıdır çünkü işleyişi uçlarından birinin aşağıya doğru hareket ettirilmesinden (doğrusal hareket) oluşur ve dolayısıyla kaldıracın diğer kolu yük ile birlikte yukarı doğru hareket eder (doğrusal hareket). Dolayısıyla doğrusal bir hareket ileten bir mekanizmadır.
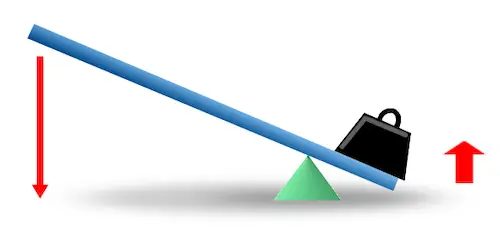
Genel olarak bu tür mekanizma, giriş kuvvetinin değiştirilmesine olanak tanır ve böylece uygulanan kuvvetten çok daha büyük bir kuvvetin uygulanmasına olanak tanır. Önceki örneği takip edersek, terazi, ağır bir nesneyi, ağırlığı mekanik bir alet olmadan kaldırmak zorunda kalacağınız duruma göre daha az kuvvetle kaldırmanıza olanak tanır.
Dairesel aktarım mekanizması
Dairesel aktarım mekanizmaları, girişte dairesel hareket yapan ve çıkışta da dairesel hareket yapan mekanizmalardır. Yani bu tür bir mekanizma dönme hareketi iletir.
Dolayısıyla dairesel bir tahrik mekanizması ile doğrusal bir tahrik mekanizması arasındaki fark, basitçe ilettikleri hareketin türüdür. Dairesel bir aktarım mekanizması dönme hareketini iletir, doğrusal bir aktarım mekanizması ise doğrusal hareketi iletir.
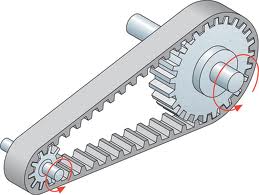
Örneğin, bir kayışla bağlanan makaralardan oluşan bir sistem, giriş makarasının dönme hareketi çıkış makarasına aktarıldığı için dairesel bir aktarım mekanizmasıdır.

Bu tür bir mekanizma, açısal hızı değiştirme işlevine sahiptir, böylece dairesel hareket iletirken dönüş hızı uygun şekilde artırılır veya azaltılır.
Bunu yapmak için giriş çarkının çapı ve çıkış çarkının çapıyla oynarız: eğer giriş çapı çıkış çapından büyükse açısal hız artar; diğer yandan Giriş çapı daha küçükse açısal hız artar. çıkış çapından daha fazla açısal hız azalır.
Zincir-dişli mekanizması olarak adlandırılan zincirli dişliler aynı zamanda dairesel bir aktarım mekanizmasıdır. Zincirlerin avantajı daha verimli olmalarıdır ancak kayışlara göre daha az esnektirler.
Son olarak dişliler de dişleri birbirine geçen dişli çarklar olduğundan ve dolayısıyla dairesel hareket bir çarktan diğerine aktarıldığından, aynı zamanda dairesel aktarım mekanizmalarıdır.
Temel olarak üç tip dişli vardır: eksenleri paralel olan düz dişliler, eksenleri dik olan konik dişliler ve dişleri helisel olan helisel dişliler.
düz dişliler

konik dişliler

helisel dişliler

Hareket Dönüşüm Mekanizması
Hareket dönüştürme mekanizmaları, giriş hareketini başka bir harekete dönüştürür, dolayısıyla giriş hareketi ve çıkış hareketi farklıdır.
Temel olarak bu tür mekanizmalar dairesel hareketi doğrusal harekete dönüştürür veya tam tersi dairesel hareketi doğrusal harekete dönüştürür.
Örneğin kam takipçisi mekanizması dairesel bir hareketi ileri geri doğrusal harekete dönüştürmek için kullanılır. Bu tür bir mekanizma geri döndürülemez; yani dairesel hareketten doğrusal harekete geçmenize izin verir, ancak tersi mümkün değildir.
Benzer şekilde kremayer ve pinyon mekanizması ileri hareketi dönme hareketine dönüştürmek için kullanılır. Bu mekanizma türü tersine çevrilebilir olduğundan dairesel bir hareketi doğrusal bir harekete dönüştürmenize de olanak tanır.
Bir mekanizmanın mekanik avantajı
Bir mekanizmanın mekanik avantajı, çıkış kuvvetinin mekanizmanın giriş kuvvetine oranıdır. Bu nedenle mekanik avantaj, çıkış kuvvetinin giriş kuvvetine oranına eşittir.
Yani bir mekanizmanın mekanik avantajını hesaplama formülü aşağıdaki gibidir:

Bir mekanizmanın mekanik avantajı, uygulanan kuvvetin hızının yükün hareket ettiği hıza bölünmesiyle de hesaplanabilir. Benzer şekilde, bu ifade de uygulanan kuvvetin noktasının yer değiştirmesinin yükün yer değiştirmesine bölünmesine eşdeğerdir:

Altın:
-

mekanik avantajdır.
-

çıkış kuvvetidir.
-

giriş kuvvetidir.
-

giriş hızıdır.
-

çıkış hızıdır.
-

girişin kat ettiği mesafedir.
-

çıkışın kat ettiği mesafedir.
Öte yandan kuvvet yerine moment iletmek istiyorsak çıkış momentinin giriş momentine bölünmesiyle mekanik avantaj hesaplanır. Örneğin tekerlek dişlilerinin mekanik avantajı iletilen momentin oranıyla ölçülür.

Altın:
-
mekanik avantajdır.
-

yayın zamanı.
-

giriş zamanıdır.
-

giriş açısal hızıdır.
-

çıkış açısal hızıdır.
Daha sonra mekanik avantaj formülünden aşağıdaki ilişkiler çıkarılabilir:
- VM>1 : Çıkış kuvveti uygulanan kuvvetten daha büyüktür, dolayısıyla mekanizma kuvvetin büyüklüğünü artırır. Öte yandan yükün kat ettiği mesafe, kuvvetin uygulandığı noktanın kat ettiği mesafeden daha azdır.
- VM<1 : Çıkış kuvveti uygulanan kuvvetten küçük olduğundan mekanizma kuvvet değerini azaltır. Ancak, kuvvetin uygulandığı noktada yapılan yer değiştirmeden daha büyük bir yük yer değiştirmesi elde ederiz.
- VM=1 : Mekanizmanın çıkış kuvveti, ona uygulanan kuvvete eşittir. Yükün yer değiştirmeleri ve kuvvetin uygulama noktası da aynıdır. Bu tür mekanizmalar herhangi bir mekanik avantaj sağlamasa da genellikle kuvveti daha rahat uygulamak için kullanılır. Örneğin, basit bir makara, aşağı doğru kuvvetin bir ağırlığı kaldırmasına izin vererek yükün kaldırılmasını kolaylaştırır.
Bir mekanizmanın serbestlik dereceleri
Bir mekanizmanın serbestlik derecesi, bir mekanizmanın kinematik durumunu tam olarak tanımlamak için gerekli olan genelleştirilmiş hızların sayısıdır.
Böylece bir mekanizmanın serbestlik derecesi sayısı aşağıdaki formül kullanılarak hesaplanır:

Altın:
-

mekanizmanın serbestlik derecesi sayısıdır.
-

mekanizmayı oluşturan katı veya elementlerin sayısıdır.
-

her katının serbestlik derecesi sayısıdır. Mekanizmayı iki boyutta incelersek her katının 3 serbestlik derecesi vardır, ancak üç boyutta çalışırsak her katının 6 serbestlik derecesi vardır.
-

k bağlantısı tarafından uygulanan kısıtlamaların sayısıdır.
Bir mekanizmanın serbestlik derecesinin, onun hareketini tanımlamak için önemli bir parametre olduğuna dikkat edilmelidir çünkü bunlar, onun hareketini tanımlamak için gereken denklemlerin sayısıyla örtüşür.