Bu makalede, fizikte düzgün değişen dairesel hareket (MCUA) olarak da adlandırılan eşit şekilde hızlandırılmış dairesel hareketin (MCUA) ne olduğu açıklanmaktadır. Ayrıca MCUA’nın özelliklerini ve bu tür dairesel harekete yönelik tüm formülleri de bulacaksınız.
Düzgün hızlandırılmış dairesel hareket (UACM) nedir?
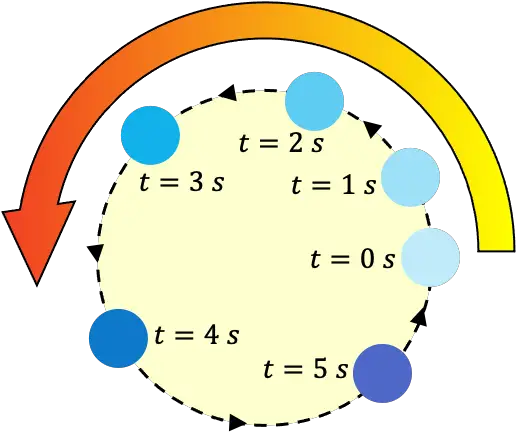
Düzgün değişen dairesel hareket (MCUV) olarak da adlandırılan düzgün hızlandırılmış dairesel hareket (MCUA) , sabit açısal ivmeyle bir eksen etrafında dönen hareketli bir gövdeyi tanımlayan bir harekettir. Bu nedenle, bir MCUA’nın açısal hızı eşit şekilde değişir.
Örneğin, bir arabanın tekerleği, çalıştırıldığında düzgün şekilde hızlandırılmış dairesel bir hareket (MCUA) izler. Benzer şekilde, bir fanın durdurulması veya bir başlığın döndürülmesi de düzgün ivmeli dairesel hareketlere örnektir.
Düzgün hızlandırılmış dairesel hareket (MCUA) ile düzgün dairesel hareket (MCU) arasındaki fark, açısal hızın değeridir. Bir MCU’da açısal hız sabittir, ancak bir MCUA’da açısal hız zamanla artar veya azalır.
Düzgün hızlandırılmış dairesel hareketin özellikleri
Düzgün hızlandırılmış dairesel hareket (MCUA) aşağıdaki özelliklere sahiptir:
- Düzgün hızlandırılmış dairesel hareketin (MCUA) temel özelliği açısal ivmenin (α) sabit olmasıdır. Bu nedenle, bir MCUA’nın açısal hızı sabit değildir, zamanla doğrusal olarak artar veya azalır.
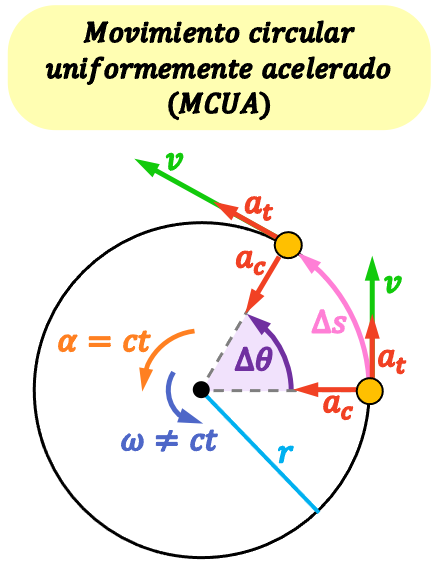
- Düzgün ivmeli bir dairesel hareketi tanımlayan cismin (v) hızı, dairesel yörüngeye teğet olduğundan buna teğetsel hız veya doğrusal hız denir. Vücut hızı zamanla doğrusal olarak artar veya azalır.
- Merkezcil ivme (veya normal ivme), mobilin ivmesinin, hızının yönünde değişikliğe neden olan ve dolayısıyla dairesel yörüngenin nedeni olan vektör bileşenidir. Merkezcil ivme (a c ) teğetsel hıza diktir ve dairesel yolun merkezine doğru işaret eder.
- Teğetsel ivme ( t’de ) yörüngeye teğettir ve mobilin hızının genliğinde değişikliğe neden olan ivmenin vektör bileşenidir. Dolayısıyla açısal ivme pozitifse teğetsel ivme de pozitif olacak ve teğetsel hız artacaktır. Öte yandan açısal ivme negatif ise teğetsel ivme de negatif olacak ve teğetsel hız azalacaktır.
Düzgün Hızlandırılmış Dairesel Hareket Formülleri
Daha sonra, eşit şekilde değişen dairesel hareket (MCUV) olarak da bilinen eşit şekilde hızlandırılmış dairesel hareket (MCUA) için tüm formüllerin ne olduğunu göreceğiz. Bu formüller bu tür hareketlerin egzersizlerini çözmemize olanak sağlayacaktır.
açısal pozisyon
Açısal konum, mobilin kat ettiği ve düzgün şekilde hızlandırılmış dairesel bir hareketi tanımlayan açıyı ifade eder. Dolayısıyla MCUA gerçekleştiren bir mobilin açısal konumunu hesaplama formülü aşağıdaki gibidir:

Altın:
-

radyan cinsinden ifade edilen son açısal konumdur.
-

radyan cinsinden ifade edilen başlangıç açısal konumudur.
-

başlangıç açısal hızıdır.
-

geçen süredir.
-

açısal ivmedir.
Açısal hız
Açısal hız, MCUA tarafından tanımlanan mobilin dönme hızıdır. Dolayısıyla açısal hız, bir cismin açısal konumunu değiştirme hızını gösterir.
Düzgün hızlandırılmış dairesel harekette (UACM), açısal hız zamanın bir fonksiyonu olarak doğrusal olarak artar veya azalır. Dolayısıyla bu durumda, bir anın açısal hızı, başlangıçtaki açısal hız artı açısal ivme çarpı geçen zamanın çarpımına eşittir.

Altın:
-

açısal hızdır.
-
başlangıç açısal hızıdır.
-
açısal ivmedir.
-
açısal hızın hesaplandığı andır.
açısal ivme
Açısal ivme, bir cismin açısal hızındaki değişimi gösterir. Başka bir deyişle açısal ivme, açısal hızın değişme hızını temsil eder.
Düzgün ivmeli dairesel harekette açısal ivme sabittir, dolayısıyla aşağıdaki formül kullanılarak hesaplanır:

Altın:
-
açısal ivmedir.
-

açısal hızdaki değişimdir.
-

zamansal değişimdir.
-

son açısal hızdır.
-

başlangıç açısal hızıdır.
-

son anımızdır.
-

başlangıç anıdır.
teğetsel hız
Teğetsel hız (veya doğrusal hız), dairesel bir hareketin yörüngesine teğet olan hızdır, yani teğetsel hız, belirli bir anda dairesel hareket yapan bir cismin anlık hızıdır.
Düzgün değişen dairesel hareketi (MCUV) tanımlayan bir cismin teğetsel hızını hesaplama formülü aşağıdaki gibidir:

Benzer şekilde, bir anın teğetsel hızı, aynı anın açısal hızının yörünge yarıçapıyla çarpımına eşittir:

Altın:
-

teğetsel hızdır.
-

başlangıç teğetsel hızıdır.
-

teğetsel ivmedir.
-
geçen zamandır.
-

teğetsel hızın hesaplandığı andaki açısal hızdır.
-

dairesel yolun yarıçapıdır.
Teğetsel ivme
Teğetsel ivme (veya doğrusal ivme), dairesel bir hareketin yoluna teğet olan ivmedir. Başka bir deyişle teğetsel ivme, dairesel hareket yapan bir cismin teğetsel hızındaki değişimi ifade eder.
Düzgün hızlandırılmış dairesel harekette (MCUA), teğetsel ivme sabittir, dolayısıyla aşağıdaki formülün uygulanmasıyla belirlenebilir:

Benzer şekilde, teğetsel ivme, açısal ivmenin yörünge yarıçapıyla çarpımına eşittir:

Altın:
-
teğetsel ivmedir.
-
açısal ivmedir.
-

teğetsel hızın değişimidir.
-
zamansal değişimdir.
-

son teğetsel hızdır.
-

başlangıç teğetsel hızıdır.
-
son anımızdır.
-
başlangıç anıdır.
-
açısal ivmedir.
-
dairesel yolun yarıçapıdır.
Merkezcil ivme
Merkezcil ivme (veya normal ivme), teğetsel hızın karesinin yörüngenin yarıçapına bölünmesine eşittir. Benzer şekilde merkezcil ivme, açısal hızın karesinin yörüngenin yarıçapıyla çarpılmasıyla da hesaplanabilir.

Altın:
-

merkezcil ivmedir (veya normal ivmedir).
-
teğetsel hızdır.
-
dairesel hareket yolunun yarıçapıdır.
-
açısal hızdır.
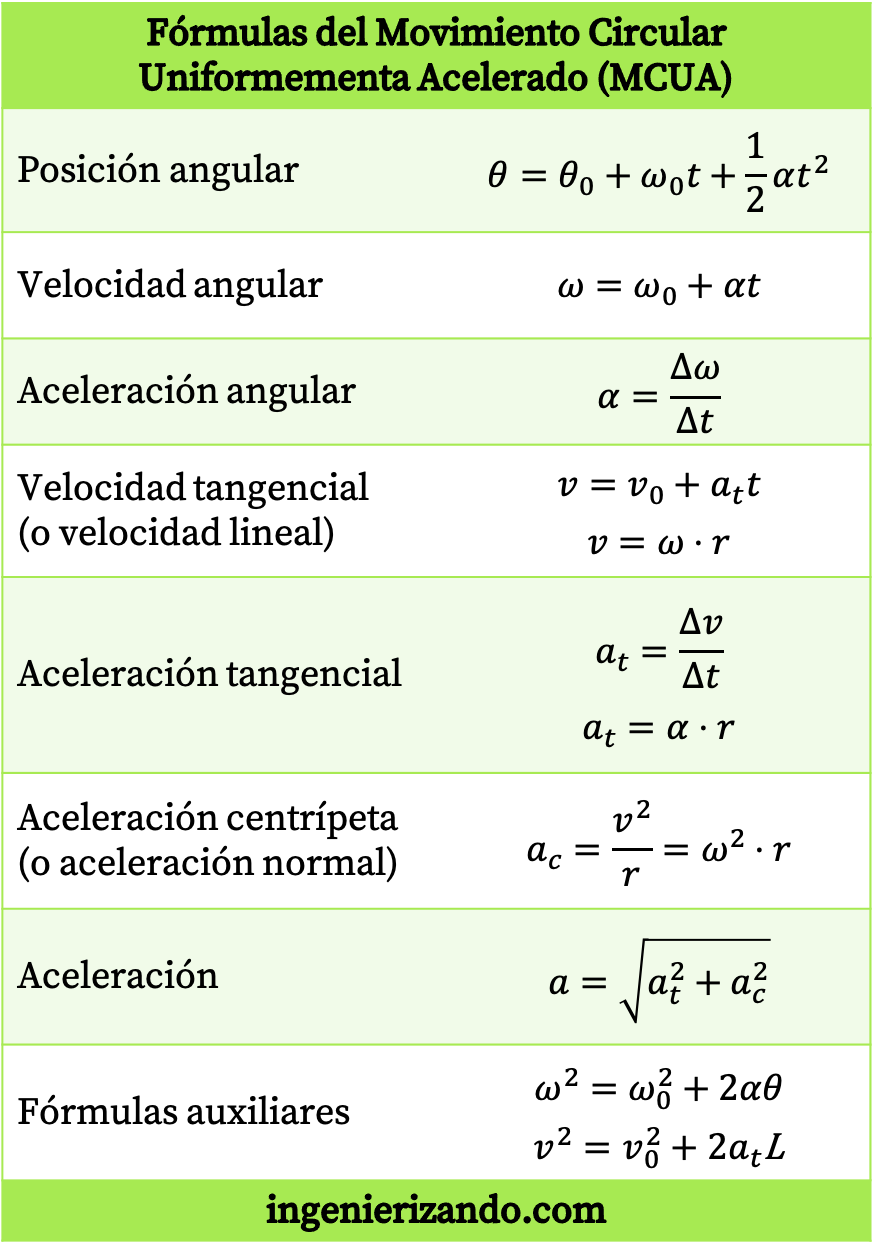
Düzgün hızlandırılmış dairesel hareket için formüllerin özeti
Özetle, aşağıda size düzgün hızlandırılmış dairesel hareket (MCUA) için tüm formülleri içeren bir tablo bırakıyoruz.