Bu makalede biyel-krank mekanizmasının ne olduğu ve ne için kullanıldığı anlatılmaktadır. Ayrıca biyel-krank mekanizmasını oluşturan farklı parçalar ve bu mekanizmanın formülü sunulmuştur.
Biyel kolu-krank mekanizması nedir?
Biyel kolu-krank mekanizması, dairesel bir hareketi öteleme hareketine veya tam tersi yönde dönüştürmek için kullanılan bir mekanizmadır. Yani biyel kolu-krank mekanizması dönme hareketini ileri geri doğrusal harekete (veya tersi) dönüştürür.
Esas olarak biyel kolu-krank mekanizması biyel kolu ve kranktan oluşur. Böylece iki mekanik parça bir dönme hareketinden doğrusal bir salınım hareketine geçmek üzere birleşir.
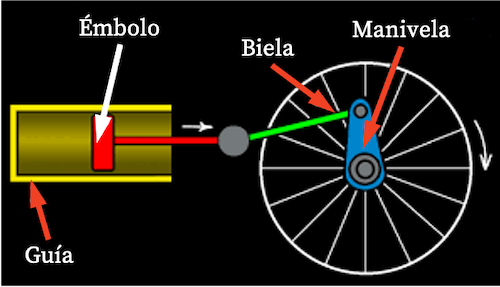
Yukarıdaki görselde görebileceğiniz gibi gri çubuk (krank) dönme hareketi yaparken, yeşil çubuğun (krank) sağ ucu ise doğrusal bir hareket gerçekleştirmektedir. Böylece biyel kolu-krank mekanizması dönme hareketinden doğrusal harekete geçmeyi mümkün kılar.
Biyel kolu-krank sistemi yeni bir buluş değil, Roma İmparatorluğu’nda zaten kullanılıyordu. Ancak çok basit bir mekanizma türü gibi görünse de mühendislikte pek çok uygulaması vardır, örneğin otomobillerdeki içten yanmalı motorlar bu mekanizmayı kullanır.
Biyel kolu-krank mekanizmasının elemanları
Esas olarak biyel kolu-krank mekanizması aşağıdaki elemanları içerir:
- Krank : Bir ucu dönme hareketine, diğer ucu biyel koluna bağlı olan sert bir çubuktur.
- Biyel kolu : Krankın dönme hareketini doğrusal harekete dönüştürmekten sorumlu olan mekanizmanın elemanıdır.
- Kılavuz : pistonun ve biyel kolunun hareketini sınırlar, bu sayede pistonun hareketi doğrusal olur.
- Piston (veya piston) : Biyel kolu-krank mekanizmasının doğrusal bir salınım hareketi gerçekleştiren, yani dönüşümlü olarak ileri ve geri hareket eden kısmı.
Biyel kolu-krank mekanizmasının formülü
Biyel-krank mekanizmasının ve bileşenlerinin tanımını gördükten sonra, bu mekanizmanın hareketini incelememizi sağlayan matematiksel formülün ne olduğunu göreceğiz.
Biyel-krank mekanizmasının denklemini bulmak için mekanizmanın aşağıdaki kinematik diyagramında gösterilen parametreler kullanılacaktır.
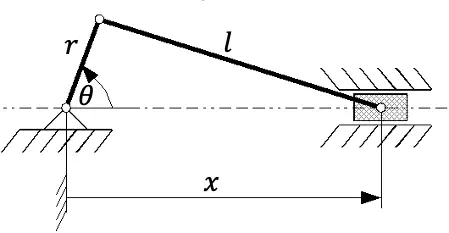
Krankın sabit ucunu referans alarak krank ucunun konumu (x), krankın yatay izdüşümü artı krankın yatay izdüşümüne eşittir. Bu nedenle biyel-krank mekanizmasının formülü aşağıdaki gibidir:

Ancak bu tip mekanizmanın formülü basitleştirilebilir. Çünkü biyel kolunun uzunluğunun krank uzunluğundan (l>>r) çok daha büyük olduğunu düşünürsek ifade şu şekilde olur:


Biyel kolu-krank mekanizmasının uygulama örnekleri
Son olarak biyel-krank sisteminin en yaygın uygulamalarından bazılarını göreceğiz.
- Pistonlu motor : İçten yanmalı motorlar, biyel-krank mekanizmasının kesinlikle en yaygın uygulamasıdır. Bu mekanizmanın görevi yakıtın patlaması sırasında oluşan enerjiyi krank milinin dairesel hareketine dönüştürmektir. Elektrikli olmayan otomobiller bu tip motoru kullanır.
- Hidrostatik pompalar : Krank mili, biyel kolu-krank sistemini tahrik eder ve piston, sıvıyı pompadan tahrik eder.
- Dikiş makinası : Bu tip makinaların çalışması biyel-krank mekanizmasına dayanmaktadır.
- Otomatik Oyuncaklar : Otomatik hareketleri olan oyuncakların çoğu aynı zamanda krank mekanizmasını da çalıştırır.