В этой статье объясняется, что такое вектор смещения в физике. Таким образом, вы найдете, как рассчитать вектор смещения и вдобавок решаемое упражнение для правильного усвоения понятия.
Что такое вектор смещения?
Вектор смещения определяется как вектор, который идет от начального положения к конечному положению, то есть вектор смещения — это вектор, который представляет собой изменение положения тела. Вектор смещения рассчитывается путем вычитания вектора конечного положения минус вектор начального положения.
Точкой приложения вектора смещения является точка, определяющая начальное положение тела, а концом вектора смещения является точка, указывающая конечное положение тела. Таким образом, в физике вектор перемещения — это вектор, обозначающий разницу между начальным и конечным положением тела.
Символ вектора смещения

.
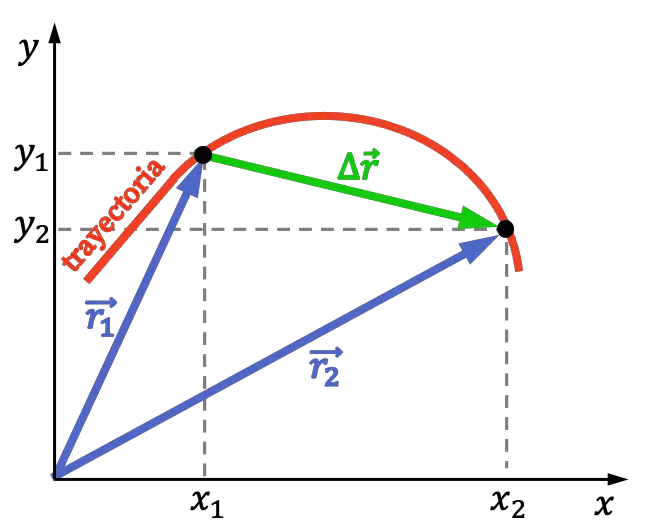
Обратите внимание, что перемещение отличается от траектории. Траектория — это весь путь, пройденный подвижным телом, тогда как вектор смещения указывает лишь на разницу между начальным положением и конечным положением.
Формула вектора смещения
Вектор смещения равен разнице между вектором конечного положения (r f ) и вектором начального положения (r i ). Следовательно, вектор смещения вычисляется путем вычитания вектора конечного положения минус вектор начального положения (Δr = r f -r i ).
Таким образом , формула для расчета вектора смещения выглядит следующим образом:

Имейте в виду, что если мы работаем в двухкоординатной системе, каждый вектор положения имеет две компоненты. Таким образом, чтобы вычислить вычитание двух векторов, мы должны вычесть их координаты:
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(x_f\vv{i }+y_f\vv{j}\right)-\left(x_i\vv{i}+y_i\vv{j}\right)\\[3ex]\Delta\vv{r}&=(x_f-x_i) \vv{i}+(y_f-y_i)\vv{j}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9de158fd25fcb5e34f8c8a8b2ea945ce_l3.png "Rendered by QuickLaTeX.com")
Золото:
-
– вектор смещения.
-

– вектор положения в последний момент.
-

– вектор положения в начальный момент времени.
-

соответственно координаты X, Y конечного положения.
-

соответственно координаты X, Y исходного положения.
-

— единичные векторы, которые представляют направления осей OX и OY соответственно.
Примечание: если мы работаем в космосе, векторы будут иметь три координаты. В этом случае в формулу необходимо добавить координату Z векторов и работать с тремя координатами.
Модуль вектора смещения
Величина вектора смещения — это расстояние между конечным и начальным положением. Следовательно, чтобы определить расстояние между двумя точками, необходимо вычислить модуль смещения между этими двумя точками.
Норма вектора смещения равна квадратному корню из суммы квадратов его составляющих. Таким образом, формула расчета модуля вектора смещения имеет следующий вид:

Золото:
-

– норма вектора смещения.
-
соответственно координаты X, Y конечного положения.
-
соответственно координаты X, Y исходного положения.
Имейте в виду, что расстояние между двумя точками, которое представляет собой величину вектора смещения между этими точками, не совпадает с пройденным расстоянием, поскольку пройденное расстояние может быть больше фактического расстояния между двумя точками.
Пример расчета вектора смещения
После того, как мы увидели определение вектора смещения и его формулу, в этом разделе мы увидим, как вычисляется вектор смещения, на примере, решенном шаг за шагом.
- Частица находится в положении

в начальный момент и через промежуток времени он находится в позиции
 . Каков вектор смещения и расстояние между этими двумя положениями?
. Каков вектор смещения и расстояние между этими двумя положениями?
Чтобы определить вектор смещения между конечной и начальной позицией, просто вычтите два вектора положения:
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(5\vv{i }+1\vv{j}\right)-\left(3\vv{i}-2\vv{j}\right)\\[3ex]\Delta\vv{r}&=\bigl(5- 3\bigr)\vv{i}+\bigl(1-(-2)\bigr)\vv{j}\\[3ex]\Delta\vv{r}&=2\vv{i}+3\ vv{j}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-3444222027ce5b4d04745c6beaa286f5_l3.png "Rendered by QuickLaTeX.com")
Тогда, чтобы найти расстояние между этими двумя точками, мы должны взять норму рассчитанного вектора смещения:
![\begin{aligned}|\Delta \vv{r}|&=\sqrt{2^2+3^2}}\\[3ex]|\Delta \vv{r}|&=\sqrt{ 4+9}\\[3ex]|\Delta \vv{r}|&=\sqrt{13}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-e1bf43dbb25c4179e4c8a79fddb56285_l3.png "Rendered by QuickLaTeX.com")
Вектор смещения и вектор положения
Наконец, мы увидим, в чем разница между вектором смещения и вектором положения, а также увидим, какова связь между этими двумя типами векторов.
Вектор положения , также называемый вектором положения , представляет собой вектор, который описывает положение точки относительно системы отсчета. Итак, в физике вектор положения используется для обозначения положения точки в системе координат.
Следовательно, вектор смещения и вектор положения связаны , поскольку вектор положения определяет положение точки, а, с другой стороны, вектор смещения указывает на изменение вектора положения между двумя моментами.