В этой статье объясняется, что такое вектор положения в физике. Таким образом, вы узнаете, каковы свойства вектора положения, как рассчитать вектор положения точки, а также шаг за шагом конкретный пример.
Что такое вектор положения?
Вектор положения или просто вектор положения — это вектор, который описывает положение точки относительно системы отсчета. То есть вектор положения используется для указания положения точки в системе координат.
Математически вектор положения точки определяется как вектор, идущий от начала координат к этой точке. Таким образом, вектор положения точки вычисляется путем вычитания координат этой точки за вычетом координат начала координат.

В общем, вектор положения выражается единичными векторами

,

И
![\vv{k}[/latex ] , qui correspondent respectivement aux coordonnées des axes X, Y et Z. Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k.
<figure class="wp-block-image aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png" alt="vecteur de position" class="wp-image-7644" width="374" height="308" srcset="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position-300x247.png 300w, https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png 697w" sizes="(max-width: 300px) 100vw, 300px"></figure>
<h2 class="wp-block-heading"><span class="ez-toc-section" id="Caracteristicas-del-vector-de-posicion"></span> Caractéristiques du vecteur de position<span class="ez-toc-section-end"></span></h2>
<p> Maintenant que nous connaissons la définition du vecteur position, voyons quelles sont ses caractéristiques.</p>
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:20px"> <span style="color:#101010;font-weight: normal;">Le vecteur position d’un point est défini comme la différence entre les coordonnées de ce point et l’origine des coordonnées. Par conséquent, la formule pour calculer le vecteur position d’un point est la suivante :</span></li>
<p> [latex]\vv{r}=PO» title=»Rendered by QuickLaTeX.com» height=»438″ width=»1546″ style=»vertical-align: -5px;»></p>
</p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-493ea824d13cdf2c289249ee201f0079_l3.png) Координаты вектора положения точки выражаются единичными векторами
Координаты вектора положения точки выражаются единичными векторами
,
И
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ.</span></li>
<p> [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}» title=»Rendered by QuickLaTeX.com» height=»41″ width=»616″ style=»vertical-align: -5px;»></p>
<p> <span style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9a41deb220b0257eea947e8a946f9a2f_l3.png) Направление вектора положения — это линия, соединяющая начало метки с рассматриваемой точкой.
Направление вектора положения — это линия, соединяющая начало метки с рассматриваемой точкой.

Обратите внимание, что вектор положения будет иметь только две координаты (x,y), если мы работаем на плоскости. С другой стороны, если мы работаем в пространстве, вектор положения будет иметь три координаты (x,y,z).
Упражнение с вектором положения решено
Чтобы лучше понять концепцию, ниже приведено решенное упражнение о том, как вычисляется вектор положения.
- Вектор положения тела во времени определяется выражением, приведенным ниже. Вычислить вектор положения тела в момент времени t=3 с и его модуль.

Чтобы найти вектор положения в момент времени t=3 с, необходимо заменить параметр t его значением и выполнить вычисления:
![\begin{aligned}\vv{r}(3)&=4\cdot 3\vv{i}+2\cdot 3^2\vv{j}+5 \vv{k}\\[2ex ]\vv{r}(3)&=12\vv{i}+18\vv{j}+5\vv{k}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-dec24ff071b35d8e731e7a0a66d6c0e0_l3.png "Rendered by QuickLaTeX.com")
Затем выводим модуль вектора положения, вычислив квадратный корень из суммы квадратов координат:
![\begin{aligned}|\vv{r}(3)|&=\sqrt{12^2+18^2+5^2}\\[2ex]|\vv{r}(3)| &=\sqrt{493}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-8c09dc9fc6db4d03b23adfc1b44c8168_l3.png "Rendered by QuickLaTeX.com")
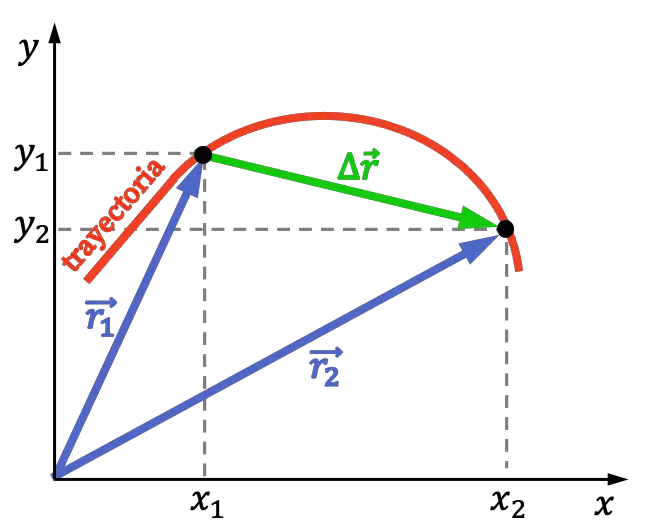
Вектор положения и смещения
Смещение точки определяется как расстояние между конечной точкой и начальной точкой. Следовательно, вектор смещения — это вектор, полученный путем вычитания вектора конечного положения минус вектор начального положения.

Следовательно, отличие вектора положения от перемещения состоит в том, что вектор положения указывает положение тела в данный момент времени, а вектор смещения указывает на расстояние между двумя разными положениями движущегося тела.
Так же и движение маршрута должно быть дифференцировано. Путь относится к общей длине пройденного пути, а смещение относится к расстоянию от конечного положения до конечного положения. Таким образом, путь может быть больше, чем смещение.