Este artigo explica o que são os mecanismos e para que são utilizados. Você encontrará, portanto, o significado de mecanismo, exemplos de mecanismos e quais são os diferentes tipos de mecanismos.
O que é um mecanismo?
Um mecanismo é um conjunto de elementos mecânicos que permitem ao ser humano realizar trabalhos com menos esforço e com mais conforto.
Mais precisamente, os mecanismos são dispositivos que, graças a um sistema de transmissão, transformam uma força ou um movimento.
A função de um mecanismo é, portanto, facilitar o trabalho do ser humano, uma vez que os mecanismos são utilizados para produzir forças ou movimentos que seriam muito difíceis ou mesmo impossíveis sem eles.

Por exemplo, o sistema de mecanismos de um carro permite que ele avance pressionando o acelerador e movendo a alavanca de câmbio. Assim, o mecanismo do veículo transforma o trabalho realizado pelo ser humano em movimento para frente.
Resumindo, um mecanismo é um conjunto de peças de uma máquina que transforma uma força ou movimento de entrada em uma força ou movimento de saída desejado.
Exemplos de mecanismos
Depois de vermos a definição do mecanismo, veremos vários exemplos de mecanismos para melhor compreender o conceito.
- Mecanismo biela-manivela : mecanismo utilizado para transformar um movimento linear em movimento circular e vice-versa.
- Mecanismo Seguidor de Cam : Um mecanismo não reversível que converte movimento rotativo em movimento linear oscilatório.
- Mecanismo sem-fim : mecanismo utilizado para transmitir um movimento rotacional entre dois eixos perpendiculares.
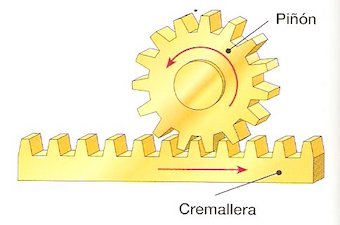
- Mecanismo de cremalheira e pinhão : mecanismo reversível que permite passar do movimento circular ao movimento linear.
- Rodas de fricção : mecanismo que transmite um movimento rotacional por fricção.
- Talha : mecanismo formado por um conjunto de roldanas que permite manusear confortavelmente objetos pesados.
- Rodas dentadas : Mecanismo usado para transmitir velocidade angular e potência entre dois eixos.
Tipos de mecanismos
Mecanismo de transmissão linear
Mecanismos de transmissão linear são aqueles mecanismos que aplicam movimento linear e, em resposta, geram outro movimento linear. Este tipo de mecanismo transmite, portanto, um movimento retilíneo.
Por exemplo, a alavanca é um mecanismo de transmissão linear porque seu funcionamento consiste em mover uma de suas extremidades para baixo (movimento linear) e, portanto, o outro braço da alavanca com a carga se move para cima (movimento linear). É, portanto, um mecanismo que transmite um movimento linear.
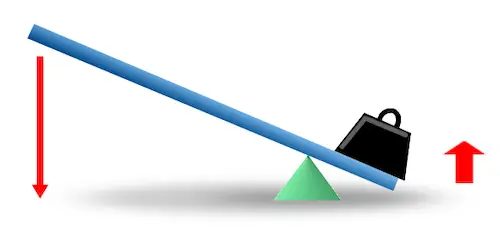
Em geral, este tipo de mecanismo permite modificar a força de entrada, permitindo assim que seja exercida uma força muito superior à aplicada. Seguindo o exemplo anterior, uma balança permite levantar um objeto pesado com menos força do que se você tivesse que levantar o peso sem um instrumento mecânico.
Mecanismo de transmissão circular
Mecanismos de transmissão circular são aqueles mecanismos que possuem um movimento circular na entrada e que também possuem um movimento circular na saída. Portanto este tipo de mecanismo transmite um movimento rotacional.
Portanto, a diferença entre um mecanismo de acionamento circular e um mecanismo de acionamento linear é simplesmente o tipo de movimento que eles transmitem. Um mecanismo de transmissão circular transmite movimento rotacional, enquanto um mecanismo de transmissão linear transmite movimento retilíneo.
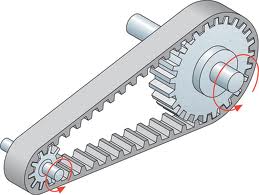
Por exemplo, um sistema de polias ligadas por uma correia é um mecanismo de transmissão circular, uma vez que o movimento rotacional da polia de entrada é transferido para a polia de saída.

Este tipo de mecanismo tem a função de modificar a velocidade angular, de forma que ao transmitir movimento circular, a velocidade de rotação seja aumentada ou reduzida conforme o caso.
Para isso, brincamos com o diâmetro da roda de entrada e o diâmetro da roda de saída: se o diâmetro de entrada for maior que o diâmetro de saída, a velocidade angular aumenta, por outro lado, se o diâmetro de entrada for menor do que o diâmetro de saída, a velocidade angular é reduzida.
As rodas dentadas com corrente, chamadas de mecanismo de roda dentada, também são um mecanismo de transmissão circular. A vantagem das correntes é que elas são mais eficientes, porém são menos flexíveis que as correias.
Por fim, as engrenagens também são mecanismos de transmissão circulares, pois são rodas dentadas cujos dentes se encaixam e, portanto, o movimento circular é transmitido de uma roda para outra.
Existem basicamente três tipos de engrenagens: engrenagens retas cujos eixos são paralelos, engrenagens cônicas cujos eixos são perpendiculares e engrenagens helicoidais cujos dentes são helicoidais.
engrenagens de dentes retos

Engrenagens cônicas

engrenagens helicoidais

Mecanismo de Transformação de Movimento
Os mecanismos de transformação de movimento convertem o movimento de entrada em outro tipo de movimento, de modo que o movimento de entrada e o movimento de saída sejam diferentes.
Basicamente, esses tipos de mecanismos transformam o movimento circular em movimento linear ou, inversamente, convertem o movimento circular em movimento linear.
Por exemplo, o mecanismo seguidor de came é usado para transformar um movimento circular em um movimento linear alternativo. Este tipo de mecanismo é irreversível, o que significa que permite passar do movimento circular ao movimento linear, mas não o contrário.
Da mesma forma, o mecanismo de cremalheira e pinhão é usado para converter o movimento de avanço em movimento rotacional. Este tipo de mecanismo é reversível, pelo que também permite transformar um movimento circular num movimento linear.
Vantagem mecânica de um mecanismo
A vantagem mecânica de um mecanismo é a relação entre a força de saída e a força de entrada do mecanismo. Portanto, a vantagem mecânica é igual à razão entre a força de saída e a força de entrada.
Portanto a fórmula para calcular a vantagem mecânica de um mecanismo é a seguinte:

A vantagem mecânica de um mecanismo também pode ser calculada dividindo a velocidade da força aplicada pela velocidade com que a carga se move. Da mesma forma, esta expressão também equivale ao deslocamento do ponto da força aplicada dividido pelo deslocamento da carga:

Ouro:
-

é a vantagem mecânica.
-

é a força de saída.
-

é a força de entrada.
-

é a velocidade de entrada.
-

é a velocidade de saída.
-

é a distância percorrida pela entrada.
-

é a distância percorrida pela saída.
Por outro lado, se quisermos transmitir um momento em vez de uma força, a vantagem mecânica é calculada dividindo o momento de saída pelo momento de entrada. Por exemplo, a vantagem mecânica das engrenagens das rodas é medida pela relação entre o momento transmitido.

Ouro:
-
é a vantagem mecânica.
-

é a hora do lançamento.
-

é o horário de entrada.
-

é a velocidade angular de entrada.
-

é a velocidade angular de saída.
Então, da fórmula da vantagem mecânica, podem ser deduzidas as seguintes relações:
- VM>1 : a força de saída é maior que a força aplicada, então o mecanismo aumenta a magnitude da força. Por outro lado, a distância percorrida pela carga é menor que a distância percorrida pelo ponto onde a força é aplicada.
- VM<1 : a força de saída é menor que a força aplicada, então o mecanismo reduz o valor da força. Porém, obtemos um deslocamento da carga maior que o deslocamento realizado no ponto de aplicação da força.
- VM=1 : a força de saída do mecanismo é igual à força exercida sobre ele. Os deslocamentos da carga e o ponto de aplicação da força também são idênticos. Embora esses tipos de mecanismos não ofereçam nenhuma vantagem mecânica, eles são frequentemente usados para exercer força de forma mais confortável. Por exemplo, uma polia simples permite que a força descendente levante um peso, facilitando o levantamento da carga.
Graus de liberdade de um mecanismo
Os graus de liberdade de um mecanismo são o número de velocidades generalizadas necessárias para definir completamente o estado cinemático de um mecanismo.
Assim, o número de graus de liberdade de um mecanismo é calculado pela seguinte fórmula:

Ouro:
-

é o número de graus de liberdade do mecanismo.
-

é o número de sólidos ou elementos que compõem o mecanismo.
-

é o número de graus de liberdade de cada sólido. Se estudarmos o mecanismo em duas dimensões, cada sólido possui 3 graus de liberdade, mas se trabalharmos em três dimensões, cada sólido possui 6 graus de liberdade.
-

é o número de restrições impostas pelo link k .
Deve-se notar que os graus de liberdade de um mecanismo são um parâmetro importante para definir o seu movimento, porque coincidem com o número de equações necessárias para descrever o seu movimento.