이 기사에서는 기어비가 무엇인지, 기어비가 어떻게 계산되는지, 그리고 개념을 완전히 이해하기 위한 해결된 기어비 연습에 대해 설명합니다.
기어비란 무엇입니까?
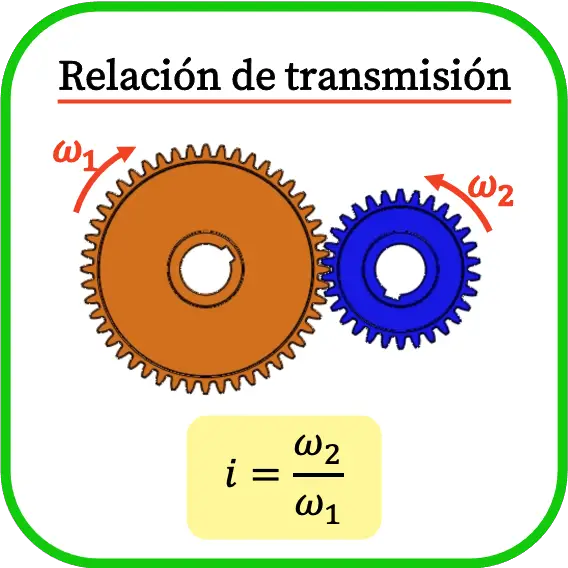
기어비는 두 기어의 회전 속도 사이의 비율입니다. 구체적으로 두 기어의 변속비는 입력기어의 각속도에 대한 출력기어의 각속도의 비로 정의된다.
일반적으로 두 개의 기어가 연결되면 그 중 하나가 다른 것보다 큽니다. 따라서 두 바퀴의 각속도가 다릅니다. 따라서 변속비는 두 바퀴의 회전 속도 사이의 관계를 나타내는 매개 변수입니다.
주로 기어비는 기어 시스템의 회전 속도가 증가하거나 감소하는 요소를 표시하는 데 사용됩니다. 그러나 기어비는 시스템의 기계적 이점도 보여줍니다. 기어비 값이 낮을수록 전달되는 모멘트가 높아지기 때문입니다.
기어비 공식
변속비의 정의를 살펴본 후 이 섹션에서는 기어의 특성 매개변수를 계산하는 방법을 살펴보겠습니다.
변속비는 출력 각속도와 입력 각속도의 비율과 같습니다. 따라서 기어비를 계산하려면 출력 휠의 각속도를 입력 휠의 각속도로 나누어야 합니다.
따라서 기어 시스템의 변속비를 계산하는 공식은 다음과 같습니다.
마찬가지로 변속비는 바퀴의 톱니 수와 직경을 통해 계산할 수도 있습니다. 따라서 변속비 공식은 다음 식으로 확장될 수 있습니다.

금:
-

전송률입니다.
-

입력 휠의 각속도입니다.
-

출력 휠의 각속도입니다.
-

입력 기어의 톱니 수입니다.
-

출력 기어의 잇수입니다.
-

입력 휠의 직경입니다.
-

출력 휠의 직경입니다.
마지막으로 원운동 전달 시 에너지 손실을 무시하면 변속비 역시 입력 모멘트(M 1 )를 출력 모멘트(M 2 )로 나눈 값과 같습니다.

기어비는 크기가 없는 매개변수입니다. 즉, 단위가 없습니다.
마지막으로 변속비 공식을 통해 다음을 추론할 수 있습니다.
- i>1 : 기어비가 1보다 크면 출력 각속도가 입력 각속도보다 크다는 의미입니다. 따라서 출력 기어의 잇수와 직경은 입력 기어의 잇수와 직경보다 작습니다.
- i<1 : 기어비가 1보다 작으면 출력 각속도가 입력 각속도보다 낮다는 의미입니다. 따라서 출력 기어의 잇수와 직경은 입력 기어의 잇수와 직경보다 큽니다.
- i=1 : 기어비가 1이면 출력 각속도가 입력 각속도와 동일함을 의미합니다. 따라서 두 바퀴의 톱니 수와 직경은 동일합니다.
기어열의 변속비
기어트레인은 여러 개의 기어가 서로 연결된 시스템입니다. 즉, 기어트레인은 두 개 이상의 바퀴로 구성됩니다.
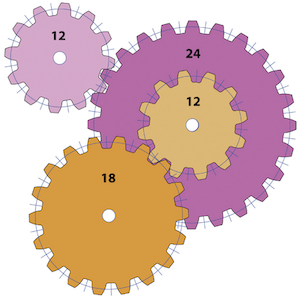
따라서 기어열의 전체 기어비는 기어 쌍 사이의 기어비를 곱한 것과 같습니다.

마찬가지로, 기어열의 전체 기어비는 구동 휠의 잇수를 구동 휠의 잇수로 나누어 계산할 수 있습니다. 따라서 기어트레인의 기어비 공식은 다음과 같습니다.

아이들러 기어는 구동 휠이자 구동 휠이기 때문에 공식의 분자와 분모 모두에 입력해야 합니다.
예를 들어, 위의 기어열 변속비 계산은 다음과 같이 수행됩니다.

변속비에 대한 운동 해결
- 다음 잇수를 갖는 두 개의 기어가 연결됩니다: Z 1 =75 및 Z 2 =25. 입력 기어가 340rpm으로 회전한다면 기어비와 출력 각속도는 어떻게 될까요?
기어비 공식을 적용하면 입력 잇수를 출력 잇수로 나누어 그 값을 계산할 수 있습니다.

그리고 기어비를 알고 나면 기어비 방정식을 사용하여 출력 휠의 회전 속도도 찾을 수 있습니다.

