이 기사에서는 다양한 유형의 메커니즘과 각 유형의 메커니즘에 대한 예를 찾을 수 있습니다.
메커니즘의 유형은 무엇입니까?
메커니즘 유형은 다음과 같습니다.
- 선형 전달 메커니즘(Linear Transmission Mechanism) : 직선 운동을 전달하는 메커니즘의 일종.
- 순환 전달 메커니즘(Circular Transmission Mechanism) : 원운동을 전달하는 메커니즘의 일종.
- 모션 변환 메커니즘(Motion Transformation Mechanism) : 입력된 모션을 다른 유형의 모션으로 변환하는 메커니즘 유형.
각 메커니즘 유형은 아래에 자세히 설명되어 있습니다.
선형 구동 메커니즘
선형 전달 메커니즘은 선형 운동을 적용하고 그에 대한 응답으로 또 다른 선형 운동을 생성하는 메커니즘입니다. 따라서 이러한 유형의 메커니즘은 직선 운동을 전달합니다.
예를 들어, 레버는 한쪽 끝을 아래쪽으로 이동(선형 이동)하고 이에 따라 하중이 있는 레버의 다른 쪽 암을 위쪽으로 이동(선형 이동)하기 때문에 레버는 선형 전달 메커니즘입니다. 따라서 선형 운동을 전달하는 메커니즘입니다.
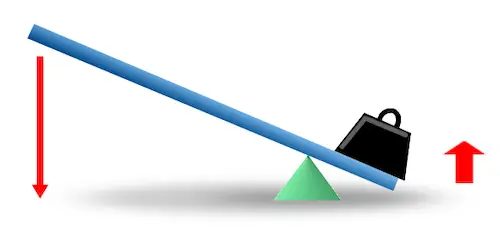
일반적으로 이러한 유형의 메커니즘을 사용하면 입력 힘을 수정할 수 있으므로 적용된 힘보다 훨씬 더 큰 힘을 가할 수 있습니다. 이전 예에 따르면, 저울을 사용하면 기계 기구 없이 무게를 들어야 하는 경우보다 더 적은 힘으로 무거운 물체를 들어 올릴 수 있습니다.
원형 전달 메커니즘
원형 전송 메커니즘은 입력에서 원형 동작을 갖고 출력에서도 원형 동작을 갖는 메커니즘입니다. 따라서 이러한 유형의 메커니즘은 회전 운동을 전달합니다.
따라서 원형 구동 메커니즘과 선형 구동 메커니즘의 차이점은 단순히 전달하는 모션 유형입니다. 원형 전달 메커니즘은 회전 운동을 전달하는 반면 선형 전달 메커니즘은 직선 운동을 전달합니다.
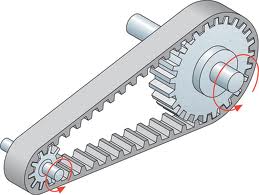
예를 들어, 벨트로 연결된 풀리 시스템은 입력 풀리의 회전 운동이 출력 풀리로 전달되므로 원형 전달 메커니즘입니다.

이러한 유형의 메커니즘에는 각속도를 수정하는 기능이 있으므로 원운동을 전달할 때 회전 속도를 적절하게 높이거나 낮추는 기능이 있습니다.
이를 위해 입력 휠의 직경과 출력 휠의 직경을 사용합니다. 입력 직경이 출력 직경보다 크면 각속도가 증가하고, 반면에 입구 직경이 작으면 각속도가 증가합니다. 출구 직경보다 각속도가 감소합니다.
체인 스프로킷 메커니즘이라고 불리는 체인이 있는 스프로킷도 원형 전달 메커니즘입니다. 체인의 장점은 더 효율적이지만 벨트보다 유연성이 떨어진다는 것입니다.
마지막으로 기어는 톱니가 서로 맞물려 한 바퀴의 원형 운동이 다른 바퀴로 전달되기 때문에 원형 전달 메커니즘이기도 합니다.
기어에는 주로 축이 평행한 직선 기어, 축이 수직인 베벨 기어, 톱니가 나선형인 헬리컬 기어의 세 가지 유형이 있습니다.
스퍼 기어

베벨 기어

헬리컬 기어

운동변형 메커니즘
모션 변환 메커니즘은 입력 모션을 다른 유형의 모션으로 변환하므로 입력 모션과 출력 모션이 다릅니다.
기본적으로 이러한 유형의 메커니즘은 원 운동을 선형 운동으로 변환하거나 그 반대로 원 운동을 선형 운동으로 변환합니다.
예를 들어, 캠 팔로워 메커니즘은 원 운동을 왕복 직선 운동으로 변환하는 데 사용됩니다. 이러한 유형의 메커니즘은 되돌릴 수 없습니다. 즉, 원 운동에서 선형 운동으로 이동할 수 있지만 그 반대는 불가능합니다.
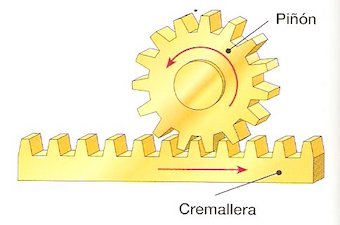
마찬가지로 랙 앤 피니언 메커니즘은 전진 운동을 회전 운동으로 변환하는 데 사용됩니다. 이러한 유형의 메커니즘은 가역적이므로 원형 운동을 선형 운동으로 변환할 수도 있습니다.
메커니즘 유형의 예
요약하면, 다양한 유형의 메커니즘에 대한 몇 가지 예가 아래에 나와 있습니다.