이 기사에서는 평형 조건이 무엇인지 설명합니다. 두 가지 균형 조건에 대한 실제 사례를 찾을 수 있으며, 또한 단계별로 해결되는 연습 문제를 통해 훈련할 수 있습니다.
평형 조건은 무엇입니까?
물리학에서 평형 상태는 힘의 합과 적용된 모멘트의 합이 0일 때 물체가 평형 상태에 있다는 것입니다.
따라서 평형에는 두 가지 조건이 있습니다. 첫 번째 조건은 합력이 0이어야 한다는 것이고, 두 번째 조건은 합력 모멘트가 0이어야 한다는 것입니다.
시스템이 평형 상태로 고려되려면 두 방정식이 모두 충족되어야 하며, 한 가지 조건만 충족하는 것만으로는 충분하지 않습니다.
균형의 첫 번째 조건
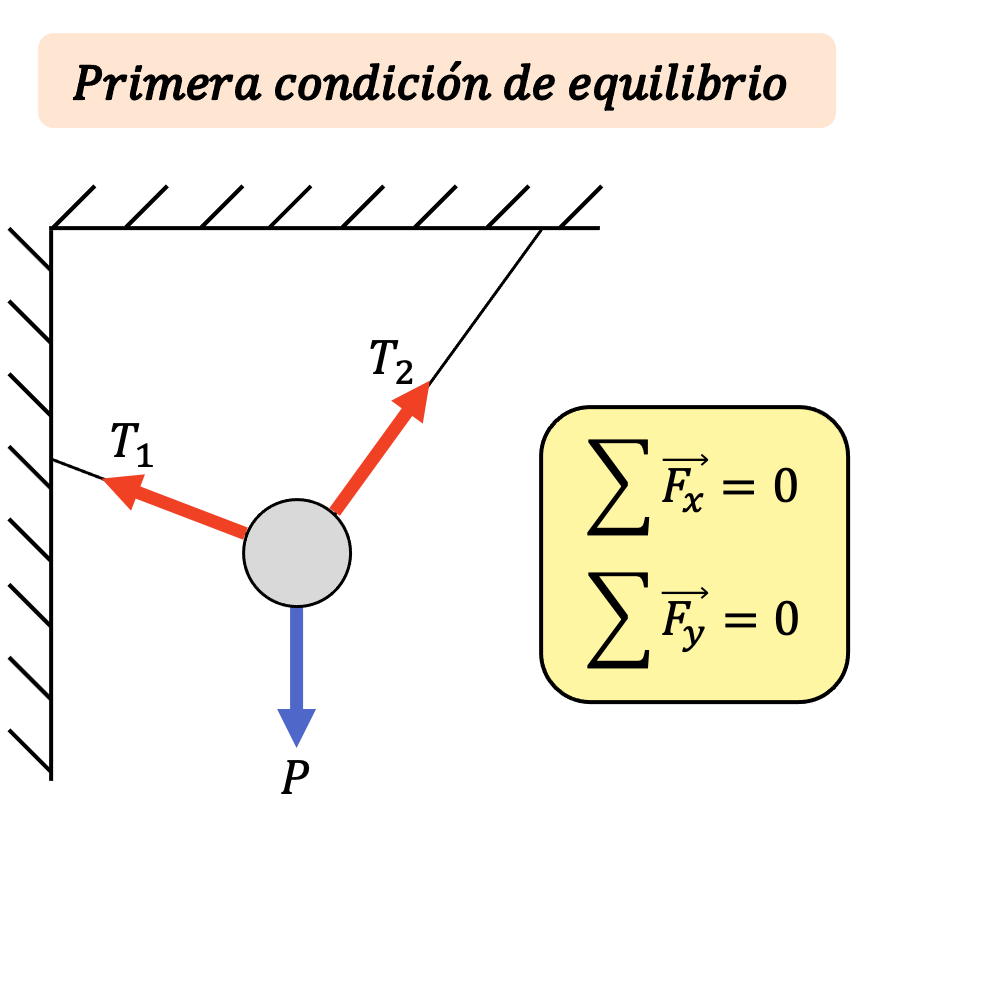
첫 번째 평형 조건은 물체가 병진 평형 상태에 있으려면 물체에 가해지는 힘의 합이 0과 같아야 한다는 것입니다.
논리적으로 힘의 합은 세 축 모두에서 0이어야 하며, 어떤 축에서도 힘의 합이 충족되지 않으면 신체의 균형이 맞지 않습니다.

또한 힘의 합이 0이면 물체에 선형 가속도가 없다는 의미입니다. 따라서 병진 평형 상태에 있는 물체는 정지 상태(0 속도)에 있거나 일정한 선형 속도로 움직일 수 있습니다.
거기에서 두 가지 유형의 병진 평형이 구별될 수 있습니다.
- 정적 병진 평형 : 첫 번째 평형 조건이 충족되고 신체도 정지 상태일 때.
- 동적 병진 평형 : 첫 번째 평형 조건이 충족되고 물체의 속도가 일정할 때(0이 아님)
두 번째 평형 조건
두 번째 평형 조건은 첫 번째 평형 조건과 유사하지만 힘 대신 모멘트를 사용합니다.
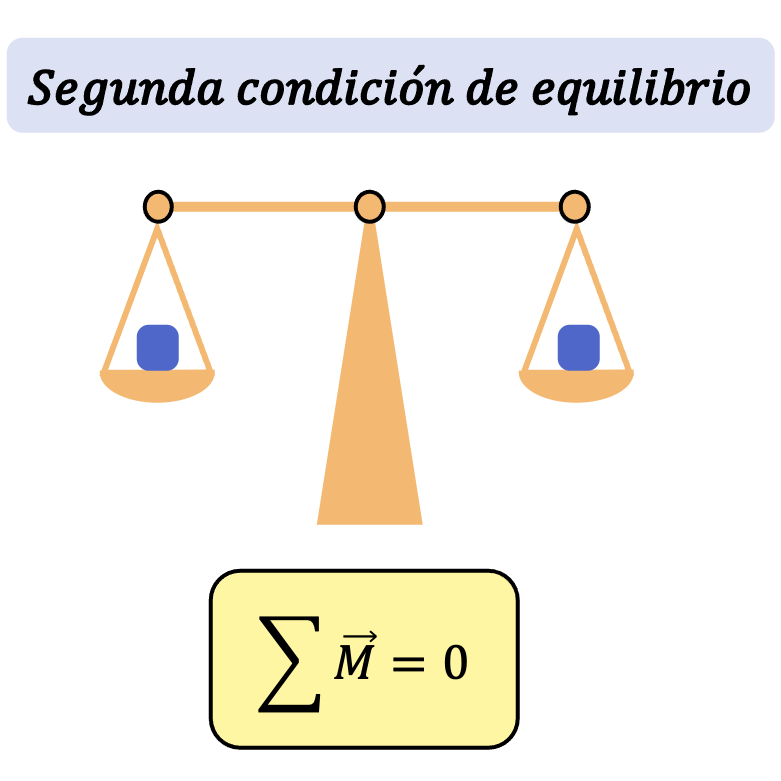
두 번째 평형 조건은 물체의 모멘트의 합이 0이면 물체가 회전 평형 상태에 있다는 것입니다.
마찬가지로, 모멘트의 합은 프레임의 모든 축에서 0이어야 하며, 그렇지 않으면 두 번째 평형 조건이 검증되지 않습니다.

한 지점에서 힘의 모멘트(또는 토크)는 힘의 값과 힘에서 지점까지의 수직 거리를 곱하여 계산된다는 점을 기억하십시오.

마찬가지로, 두 번째 평형 조건이 충족되려면 물체의 각가속도가 0이어야 합니다. 즉, 이 상태에서는 물체가 회전하지 않거나 일정한 각속도로 회전하지 않습니다.
평형 조건의 예
두 가지 평형 조건의 정의를 본 후 아래의 일상 생활에서 몇 가지 예를 보고 개념을 완전히 이해할 수 있습니다.
예를 들어, 몸이 천장에 매달려 있으면 시스템이 완전히 정지해 있기 때문에 몸의 균형이 유지됩니다. 시스템이 정적 평형 상태에 있다고 말할 수도 있습니다.
일상 생활의 균형 조건의 또 다른 예는 규모입니다. 균형 암이 안정되고 회전을 멈추면 시스템은 정지 상태이므로 균형도 유지됩니다.
평형 조건 문제 해결
연습 1
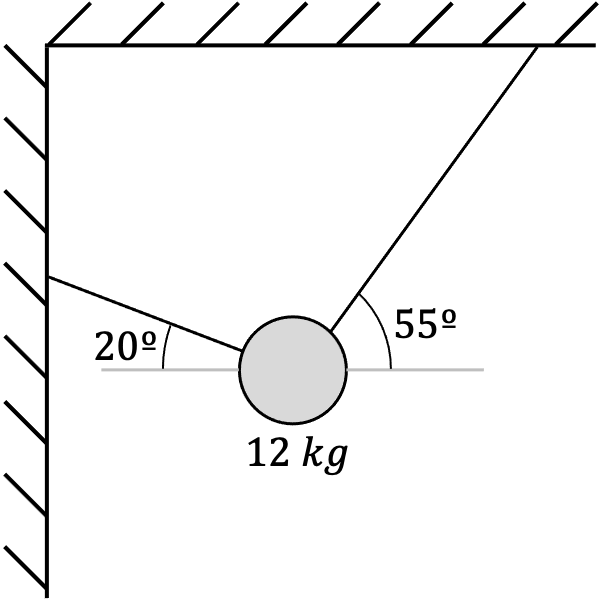
다음 그림에 각도가 표시된 두 개의 로프에 매달려 있는 12kg의 질량을 가진 강체가 주어졌을 때 몸체를 평형 상태로 유지하기 위해 각 로프가 가해야 하는 힘을 계산하십시오.
이러한 유형의 문제를 해결하기 위해 가장 먼저 해야 할 일은 그림의 자유물체도를 그리는 것입니다.
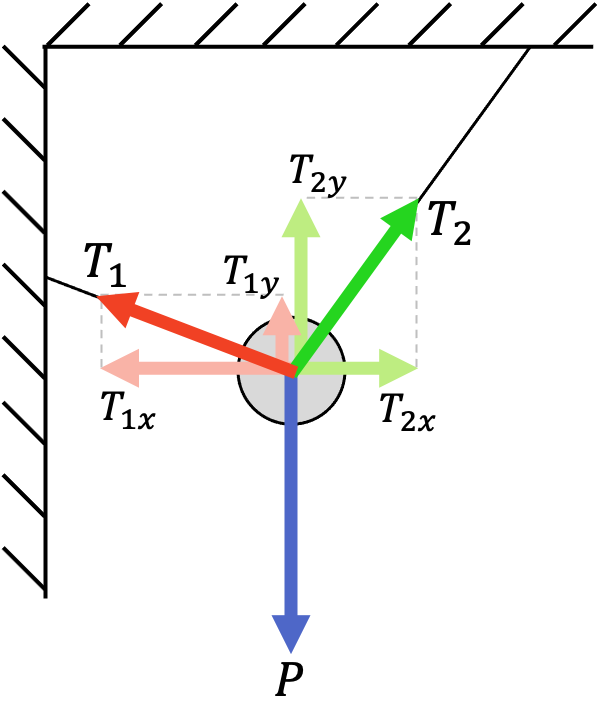
매달린 물체에 작용하는 힘은 실제로 세 가지 힘, 즉 무게의 힘 P와 줄의 장력 T 1 및 T 2 뿐입니다. T 1x , T 1y , T 2x 및 T 2y 로 표시된 힘은 각각 T 1 및 T 2 의 벡터 구성요소입니다.
따라서 우리는 줄의 경사각을 알고 있으므로 장력의 벡터 구성 요소에 대한 표현을 찾을 수 있습니다.




반면에 중력에 대한 공식을 적용하여 무게의 힘을 계산할 수 있습니다.

문제 설명은 물체가 평형 상태에 있으므로 수직 힘의 합과 수평 힘의 합이 0이 되어야 함을 알려줍니다. 따라서 힘 방정식을 설정하고 이를 0으로 설정할 수 있습니다.


이제 제약 조건의 구성 요소를 이전에 찾은 표현식으로 대체합니다.


그리고 마지막으로 방정식 시스템을 풀어 힘 T 1 과 T 2 의 값을 얻습니다.
![\left.\begin{array}{l}-T_1\cdot 0,94+T_2\cdot 0,57=0\\[2ex]T_1\cdot 0,34+T_2\cdot 0,82-117 .72=0\end{array }\right\} \longrightarrow \ \begin{array}{c}T_1=69,56 \ N\\[2ex]T_2=114,74 \ N\end{array}[/ latex]
<div class="wp-block-otfm-box-spoiler-end otfm-sp_end"></div>
<h3 class="wp-block-heading"> Exercice 2</h3>
<p> Calculer le moment que doit faire le support de la poutre suivante pour qu’elle soit en équilibre de rotation : </p>
<div class="wp-block-image">
<figure class="aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png" alt="Exercice résolu de la deuxième condition d'équilibre" class="wp-image-397" width="237" height="203" srcset="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre-300x257.png 300w, https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png 643w" sizes="(max-width: 300px) 100vw, 300px"></figure>
</div>
<div class="wp-block-otfm-box-spoiler-start otfm-sp__wrapper otfm-sp__box js-otfm-sp-box__closed otfm-sp__FFF8E1" role="button" tabindex="0" aria-expanded="false" data-otfm-spc="#FFF8E1" style="text-align:center">
<div class="otfm-sp__title"> <strong>Voir la solution</strong></div>
</div>
<p> Pour que la poutre soit en équilibre de rotation et que la deuxième condition d’équilibre soit donc remplie, le support doit contrecarrer le moment de torsion généré par la force, donc la somme des moments sera nulle. On calcule donc le moment (ou couple) généré par la force au niveau de l’appui : [latex]M_{force}=13\cdot 9 = 117 \ Nm” title=”Rendered by QuickLaTeX.com” height=”343″ width=”3353″ style=”vertical-align: 0px;”></p>
</p>
<p class=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-694655a52049a536489cebbaef3bc7a2_l3.png) 이제 우리는 순간 균형 방정식을 설명합니다.
이제 우리는 순간 균형 방정식을 설명합니다.

힘을 생성하는 순간은 화면 내부를 통과하므로 해당 부호는 음수입니다.

마지막으로 방정식에서 미지수를 푼다.

획득한 순간은 양의 부호를 가지므로 그 의미는 화면 외부에 있습니다.
연습 3
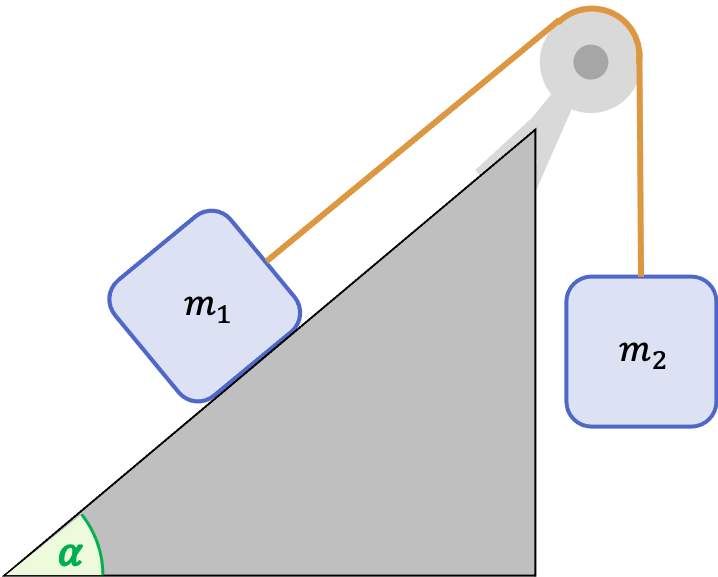
다음 그림에서 볼 수 있듯이 두 물체는 로프와 무시할 만한 질량의 도르래로 연결되어 있습니다. 물체 2의 질량이 7kg이고 경사로의 경사가 50°인 경우 전체 시스템이 평형 상태가 되도록 물체 1의 질량을 계산합니다. 이 경우 마찰력은 무시할 수 있습니다.
몸체 1은 경사진 경사면에 있으므로 가장 먼저 해야 할 일은 경사면의 축에 힘이 가해지도록 무게의 힘을 벡터화하는 것입니다.


따라서 전체 시스템에 작용하는 힘의 집합은 다음과 같습니다.
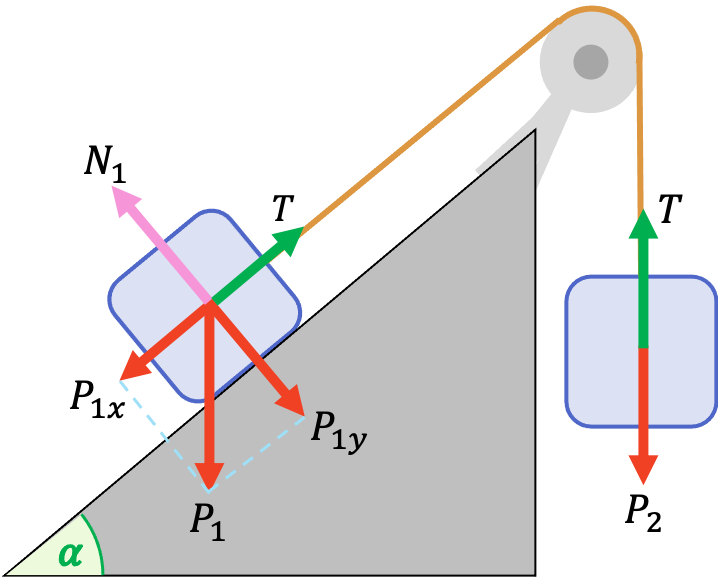
문제 설명은 힘의 시스템이 평형 상태에 있으므로 두 물체가 평형 상태에 있어야 함을 알려줍니다. 이 정보로부터 우리는 두 물체의 평형 방정식을 공식화할 수 있습니다.
![1\ \rightarrow \ \begin{cases}P_{1x}=T\\[2ex]P_{1y}=N\end{cases} \qquad\qquad 2 \ \rightarrow \ T=P_2[/latex ] Ainsi, la composante du poids de l'objet 1 incliné dans le sens de la pente doit être égale au poids de l'objet 2 : [latex]P_{1x}=P_2](https://physigeek.com/wp-content/ql-cache/quicklatex.com-ed082b4f064316ab20fb0d26054d3010_l3.png "Rendered by QuickLaTeX.com")

이제 중력 공식을 적용하고 방정식을 단순화합니다.


마지막으로 데이터를 대체하고 몸체 1의 질량을 구합니다.



연습 4
다음 그림에서 볼 수 있듯이, 길이 10m의 수평 막대가 질량이 8kg인 물체를 지탱하고 있습니다. 지지대와 매달린 물체 사이의 거리를 알 때, 시스템이 회전과 병진의 균형을 이루고 있는 경우 지지대가 가하는 힘의 값은 얼마입니까?
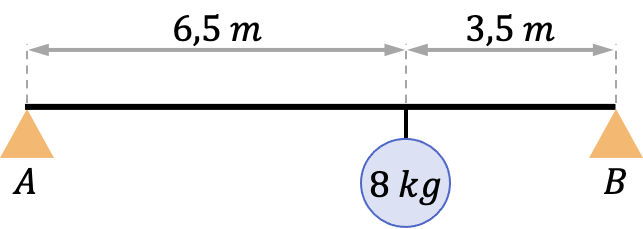
먼저 중력 공식을 사용하여 수평 막대가 지탱해야 하는 무게를 계산합니다.

따라서 시스템의 자유물체도는 다음과 같습니다.
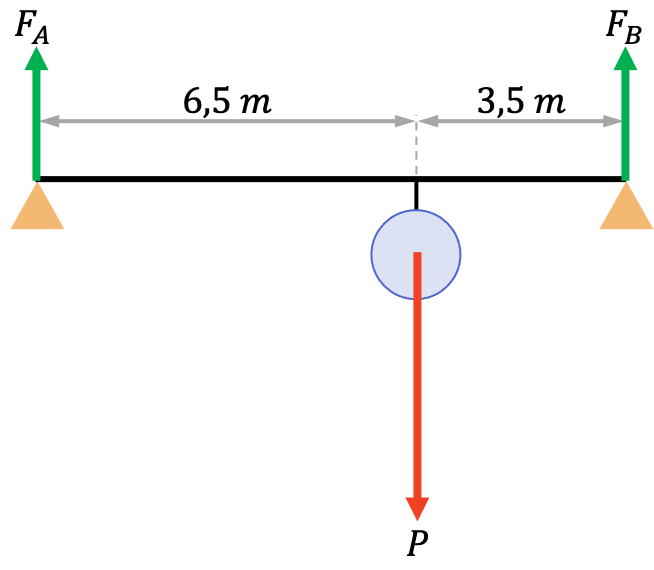
문제 설명은 시스템이 힘의 균형을 이루고 있으므로 모든 힘의 합이 0이 되어야 함을 알려줍니다. 이 평형 조건을 사용하여 다음 방정식을 공식화할 수 있습니다.

반면에, 이 진술은 또한 시스템이 운동량 평형 상태에 있음을 알려줍니다. 따라서 시스템의 어느 지점에서든 모멘트의 합을 고려하면 결과는 0이어야 하며, 두 지지점 중 하나의 기준점을 취하면 단일 미지수를 갖는 방정식을 갖게 됩니다.


이제 방정식에서 미지수를 풀어 지지체 B가 가하는 힘을 계산할 수 있습니다.



그리고 마지막으로, 얻은 값을 수직력 방정식에 대입하면 다른 지지대에 가해지는 힘의 강도를 알 수 있습니다.

