이 문서에서는 메커니즘이 무엇이고 어떤 용도로 사용되는지 설명합니다. 따라서 메커니즘의 의미, 메커니즘의 예, 다양한 유형의 메커니즘이 무엇인지 알아볼 수 있습니다.
메커니즘이란 무엇입니까?
메커니즘은 인간이 더 적은 노력으로 더 편안하게 작업을 수행할 수 있도록 하는 일련의 기계 요소입니다.
보다 정확하게는 메커니즘은 전달 시스템 덕분에 힘이나 움직임을 변환하는 장치입니다.
따라서 메커니즘의 기능은 인간의 작업을 용이하게 하는 것입니다. 왜냐하면 메커니즘이 없으면 매우 어렵거나 심지어 불가능할 힘이나 움직임을 생성하는 데 메커니즘이 사용되기 때문입니다.

예를 들어 자동차의 메커니즘 시스템을 사용하면 가속 페달을 밟고 기어 레버를 움직여 앞으로 이동할 수 있습니다. 따라서 차량 메커니즘은 인간이 수행하는 작업을 전진 이동으로 변환합니다.
간단히 말해서, 메커니즘은 입력된 힘 또는 동작을 원하는 출력 힘 또는 동작으로 변환하는 기계 부품 세트입니다.
메커니즘의 예
메커니즘의 정의를 살펴본 후에는 개념을 더 잘 이해할 수 있도록 메커니즘의 몇 가지 예를 살펴보겠습니다.
- 커넥팅 로드-크랭크 메커니즘 : 선형 운동을 원형 운동으로 또는 그 반대로 변환하는 데 사용되는 메커니즘.
- 캠 팔로워 메커니즘(Cam Follower Mechanism) : 회전 운동을 진동 직선 운동으로 변환하는 비가역 메커니즘입니다.
- 웜 메커니즘 : 두 개의 수직 축 사이에서 회전 운동을 전달하는 데 사용되는 메커니즘입니다.
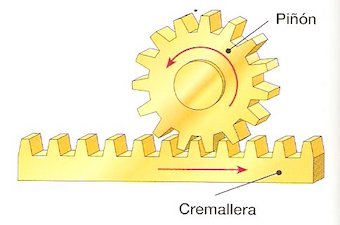
- 랙 앤 피니언 메커니즘 : 원형 운동에서 선형 운동으로 전환할 수 있는 리버시블 메커니즘입니다.
- 마찰바퀴 : 마찰에 의해 회전운동을 전달하는 기구.
- 호이스트(Hoist) : 무거운 물체를 편안하게 다룰 수 있도록 도르래 세트로 구성된 메커니즘.
- 스프로킷(Sprocket) : 두 축 사이에서 각속도와 동력을 전달하는 데 사용되는 메커니즘.
메커니즘 유형
선형 전달 메커니즘
선형 전달 메커니즘은 선형 운동을 적용하고 그에 대한 응답으로 또 다른 선형 운동을 생성하는 메커니즘입니다. 따라서 이러한 유형의 메커니즘은 직선 운동을 전달합니다.
예를 들어, 레버는 한쪽 끝을 아래쪽으로 이동(선형 이동)하고 이에 따라 하중이 있는 레버의 다른 쪽 암을 위쪽으로 이동(선형 이동)하기 때문에 레버는 선형 전달 메커니즘입니다. 따라서 선형 운동을 전달하는 메커니즘입니다.
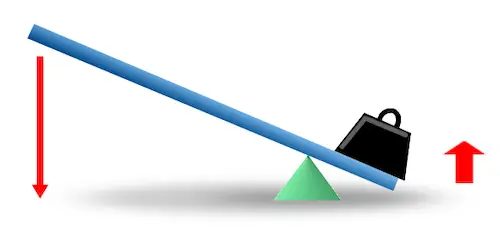
일반적으로 이러한 유형의 메커니즘을 사용하면 입력 힘을 수정할 수 있으므로 적용된 힘보다 훨씬 더 큰 힘을 가할 수 있습니다. 이전 예에 따르면, 저울을 사용하면 기계 기구 없이 무게를 들어야 하는 경우보다 더 적은 힘으로 무거운 물체를 들어 올릴 수 있습니다.
원형 전달 메커니즘
원형 전송 메커니즘은 입력에서 원형 동작을 갖고 출력에서도 원형 동작을 갖는 메커니즘입니다. 따라서 이러한 유형의 메커니즘은 회전 운동을 전달합니다.
따라서 원형 구동 메커니즘과 선형 구동 메커니즘의 차이점은 단순히 전달하는 모션 유형입니다. 원형 전달 메커니즘은 회전 운동을 전달하는 반면 선형 전달 메커니즘은 직선 운동을 전달합니다.
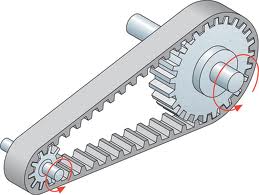
예를 들어, 벨트로 연결된 풀리 시스템은 입력 풀리의 회전 운동이 출력 풀리로 전달되므로 원형 전달 메커니즘입니다.

이러한 유형의 메커니즘에는 각속도를 수정하는 기능이 있으므로 원운동을 전달할 때 회전 속도를 적절하게 높이거나 낮추는 기능이 있습니다.
이를 위해 입력 휠의 직경과 출력 휠의 직경을 사용합니다. 입력 직경이 출력 직경보다 크면 각속도가 증가하고, 반면에 입구 직경이 작으면 각속도가 증가합니다. 출구 직경보다 각속도가 감소합니다.
체인 스프로킷 메커니즘이라고 불리는 체인이 있는 스프로킷도 원형 전달 메커니즘입니다. 체인의 장점은 더 효율적이지만 벨트보다 유연성이 떨어진다는 것입니다.
마지막으로 기어는 톱니가 서로 맞물려 원형 운동이 한 바퀴에서 다른 바퀴로 전달되기 때문에 원형 전달 메커니즘이기도 합니다.
기어에는 주로 축이 평행한 직선 기어, 축이 수직인 베벨 기어, 톱니가 나선형인 헬리컬 기어의 세 가지 유형이 있습니다.
스퍼 기어

베벨 기어

헬리컬 기어

운동변형 메커니즘
모션 변환 메커니즘은 입력 모션을 다른 유형의 모션으로 변환하므로 입력 모션과 출력 모션이 다릅니다.
기본적으로 이러한 유형의 메커니즘은 원운동을 선형 운동으로 변환하거나 반대로 원운동을 선형 운동으로 변환합니다.
예를 들어, 캠 팔로워 메커니즘은 원 운동을 왕복 직선 운동으로 변환하는 데 사용됩니다. 이러한 유형의 메커니즘은 되돌릴 수 없습니다. 즉, 원 운동에서 선형 운동으로 이동할 수 있지만 그 반대는 불가능합니다.
마찬가지로 랙 앤 피니언 메커니즘은 전진 운동을 회전 운동으로 변환하는 데 사용됩니다. 이러한 유형의 메커니즘은 가역적이므로 원형 운동을 선형 운동으로 변환할 수도 있습니다.
메커니즘의 기계적 이점
메커니즘의 기계적 이점은 메커니즘의 입력 힘에 대한 출력 힘의 비율입니다. 따라서 기계적 이점은 입력 힘에 대한 출력 힘의 비율과 같습니다.
따라서 메커니즘의 기계적 이점을 계산하는 공식은 다음과 같습니다.

메커니즘의 기계적 이점은 적용된 힘의 속도를 부하가 이동하는 속도로 나누어 계산할 수도 있습니다. 마찬가지로, 이 표현식은 적용된 힘의 지점 변위를 하중 변위로 나눈 것과 동일합니다.

금:
-

기계적 장점이다.
-

출력력이다.
-

입력 힘입니다.
-

입력 속도입니다.
-

출구 속도입니다.
-

입구에서 이동한 거리입니다.
-

출력이 이동한 거리입니다.
반면, 힘 대신 모멘트를 전달하려는 경우 출력 모멘트를 입력 모멘트로 나누어 기계적 이점을 계산합니다. 예를 들어, 휠 기어의 기계적 장점은 전달된 모멘트의 비율로 측정됩니다.

금:
-
기계적 장점이다.
-

출시 시간입니다.
-

입장 시간이에요.
-

입력 각속도입니다.
-

출구 각속도입니다.
그런 다음 기계적 이점 공식에서 다음 관계를 추론할 수 있습니다.
- VM>1 : 출력되는 힘이 가해지는 힘보다 크기 때문에 메커니즘은 힘의 크기를 증가시킵니다. 반면, 하중이 이동한 거리는 힘이 가해지는 지점이 이동한 거리보다 작습니다.
- VM<1 : 출력 힘이 적용된 힘보다 작으므로 메커니즘이 힘 값을 줄입니다. 그러나 우리는 힘이 가해지는 지점에서 발생한 변위보다 더 큰 하중의 변위를 얻습니다.
- VM=1 : 메커니즘의 출력 힘은 메커니즘에 가해지는 힘과 같습니다. 하중의 변위와 힘이 가해지는 지점도 동일합니다. 이러한 유형의 메커니즘은 기계적 이점을 제공하지 않지만 보다 편안하게 힘을 가하는 데 종종 사용됩니다. 예를 들어, 간단한 도르래를 사용하면 아래쪽 힘으로 무게를 들어 올릴 수 있어 짐을 더 쉽게 들어올릴 수 있습니다.
메커니즘의 자유도
메커니즘의 자유도는 메커니즘의 운동학적 상태를 완전히 정의하는 데 필요한 일반화된 속도의 수입니다.
따라서 메커니즘의 자유도는 다음 공식을 사용하여 계산됩니다.

금:
-

메커니즘의 자유도 수입니다.
-

메커니즘을 구성하는 솔리드 또는 요소의 수입니다.
-

각 솔리드의 자유도 수입니다. 메커니즘을 2차원에서 연구하면 각 입체도는 3개의 자유도를 가지지만, 3차원에서 작업하면 각 입체도는 6개의 자유도를 갖습니다.
-

링크 k 에 의해 부과된 제약 조건의 수입니다.
메커니즘의 자유도는 동작을 설명하는 데 필요한 방정식의 수와 일치하기 때문에 동작을 정의하는 중요한 매개변수라는 점에 유의해야 합니다.