この記事では、さまざまなタイプのメカニズムと、各タイプのメカニズムの例について説明します。
仕組みにはどのような種類があるのでしょうか?
メカニズムの種類は次のとおりです。
- 直線伝達機構:直線運動を伝達する機構の一種。
- 円形伝達機構:円運動を伝達する機構の一種。
- モーション変換機構: 入力されたモーションを別のタイプのモーションに変換する機構のタイプ。
以下、それぞれの仕組みについて詳しく説明します。
リニアドライブ機構
線形伝達機構は、直線運動を加え、それに応じて別の直線運動を生成する機構です。したがって、このタイプの機構は直線運動を伝達します。
たとえば、レバーは、その動作がその一方の端を下方に動かすこと(直線運動)で構成されているため、荷重を受けたレバーの他方の腕が上方に動きます(直線運動)ので、線形伝達機構です。したがって、直線的な動きを伝達する機構です。
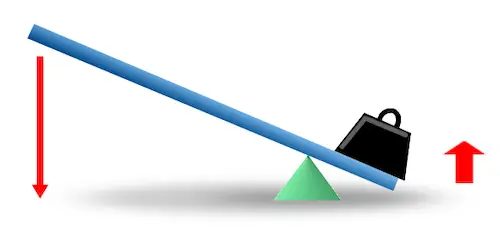
一般に、このタイプの機構では入力力を変更できるため、加えられた力よりもはるかに大きな力を加えることができます。前の例に続き、はかりを使用すると、機械器具を使わずに重量物を持ち上げる場合よりも少ない力で重い物体を持ち上げることができます。
循環伝達機構
円形伝達機構は、入力側で円運動をし、出力側でも円運動をする機構です。したがって、このタイプの機構は回転運動を伝達します。
したがって、円形駆動機構と直線駆動機構の違いは、伝達する運動の種類にすぎません。円形伝達機構は回転運動を伝達し、直線伝達機構は直線運動を伝達します。
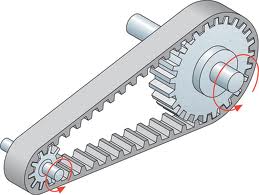
たとえば、ベルトでリンクされたプーリー システムは、入力プーリーの回転運動が出力プーリーに伝達されるため、円形伝動機構となります。

このような機構には角速度を変化させる機能があり、円運動を伝達する際に回転速度を適宜増減させます。
これを行うには、入力ホイールの直径と出力ホイールの直径を調整します。入力直径が出力直径よりも大きい場合、角速度は増加します。一方、入口の直径が小さい場合は、角速度が増加します。出口直径よりも角速度が減少します。
チェーン付きスプロケット (チェーン・スプロケット機構) も円形伝動機構です。チェーンの利点は効率が高いことですが、ベルトに比べて柔軟性が劣ることです。
最後に、歯車は歯がかみ合う歯車であり、一方の歯車の円運動が他方の歯車に伝達されるため、歯車も円形伝達機構です。
歯車には主に、軸が平行な直歯車、軸が直交するかさ歯車、歯がはすば状のはすば歯車の3種類があります。
平歯車

かさ歯車

はすば歯車

運動変換メカニズム
モーション変換メカニズムは、入力モーションを別のタイプのモーションに変換するため、入力モーションと出力モーションは異なります。
基本的に、これらのタイプの機構は、円運動を直線運動に変換するか、またはその逆に、円運動を直線運動に変換します。
たとえば、カムフォロア機構は円運動を往復直線運動に変換するために使用されます。このタイプのメカニズムは不可逆的です。つまり、円運動から直線運動への移行は可能ですが、その逆は不可能です。
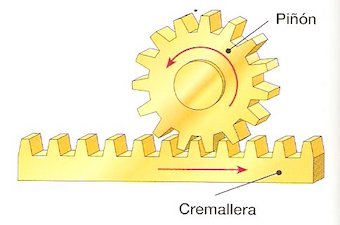
同様に、ラックアンドピニオン機構は、前進運動を回転運動に変換するために使用されます。このタイプの機構は可逆的であるため、円運動を直線運動に変換することもできます。
機構の種類の例
要約すると、さまざまな種類のメカニズムの例をいくつか以下に示します。
- 直線伝動機構:リフト、プーリー、ホイストなど
- 円形伝達機構:摩擦車、無端ネジ、歯車など
- 運動変換機構:ラック-ピニオン、スクリュー-ナット、コンロッド-クランクなど