この記事では、物理学における位置ベクトルとは何かについて説明します。したがって、位置ベクトルの特性、点の位置ベクトルの計算方法、および具体的な例を段階的に理解できます。
位置ベクトルとは何ですか?
位置ベクトル、または単に位置ベクトル は、基準系に対する点の位置を記述するベクトルです。つまり、位置ベクトルは、座標系内の点の位置を示すために使用されます。
数学的には、点の位置ベクトルは、座標の原点からその点に向かうベクトルとして定義されます。したがって、点の位置ベクトルは、その点の座標から原点座標を減算することによって計算されます。

一般に、位置ベクトルは単位ベクトルで表現されます。

、

そして
![\vv{k}[/latex ] , qui correspondent respectivement aux coordonnées des axes X, Y et Z. Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k.
<figure class="wp-block-image aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png" alt="vecteur de position" class="wp-image-7644" width="374" height="308" srcset="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position-300x247.png 300w, https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png 697w" sizes="(max-width: 300px) 100vw, 300px"></figure>
<h2 class="wp-block-heading"><span class="ez-toc-section" id="Caracteristicas-del-vector-de-posicion"></span> Caractéristiques du vecteur de position<span class="ez-toc-section-end"></span></h2>
<p> Maintenant que nous connaissons la définition du vecteur position, voyons quelles sont ses caractéristiques.</p>
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:20px"> <span style="color:#101010;font-weight: normal;">Le vecteur position d’un point est défini comme la différence entre les coordonnées de ce point et l’origine des coordonnées. Par conséquent, la formule pour calculer le vecteur position d’un point est la suivante :</span></li>
<p> [latex]\vv{r}=PO” title=”Rendered by QuickLaTeX.com” height=”438″ width=”1546″ style=”vertical-align: -5px;”></p>
</p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-493ea824d13cdf2c289249ee201f0079_l3.png) 点の位置ベクトルの座標は単位ベクトルで表現されます。
点の位置ベクトルの座標は単位ベクトルで表現されます。
、
そして
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ.</span></li>
<p> [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}” title=”Rendered by QuickLaTeX.com” height=”41″ width=”616″ style=”vertical-align: -5px;”></p>
<p><span style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9a41deb220b0257eea947e8a946f9a2f_l3.png) 位置ベクトルの方向は、マークの原点と対象の点を結ぶ線です。
位置ベクトルの方向は、マークの原点と対象の点を結ぶ線です。

平面内で作業する場合、位置ベクトルには 2 つの座標 (x,y) しかないことに注意してください。一方、空間で作業する場合、位置ベクトルには 3 つの座標 (x、y、z) が含まれます。
位置ベクトルの演習が解決されました
概念をよく理解するために、位置ベクトルがどのように計算されるかについての演習を以下に示します。
- 物体の位置と時間のベクトルは次の式で定義されます。時刻 t=3 秒における物体の位置ベクトルとそのモジュールを計算します。

時刻 t=3 s での位置ベクトルを見つけるには、パラメーター t をその値に置き換えて計算を行う必要があります。
![\begin{aligned}\vv{r}(3)&=4\cdot 3\vv{i}+2\cdot 3^2\vv{j}+5 \vv{k}\\[2ex ]\vv{r}(3)&=12\vv{i}+18\vv{j}+5\vv{k}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-dec24ff071b35d8e731e7a0a66d6c0e0_l3.png "Rendered by QuickLaTeX.com")
次に、座標の二乗和の平方根を計算して、位置ベクトルのモジュールを出力します。
![\begin{aligned}|\vv{r}(3)|&=\sqrt{12^2+18^2+5^2}\\[2ex]|\vv{r}(3)| &=\sqrt{493}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-8c09dc9fc6db4d03b23adfc1b44c8168_l3.png "Rendered by QuickLaTeX.com")
位置と変位ベクトル
点のオフセットは、終点と始点の間の距離として定義されます。したがって、変位ベクトルは、最終位置ベクトルから初期位置ベクトルを引いたベクトルになります。

したがって、位置ベクトルと変位の違いは、位置ベクトルが特定の時刻における物体の位置を示すのに対し、変位ベクトルは移動体の 2 つの異なる位置間の距離を示すことです。
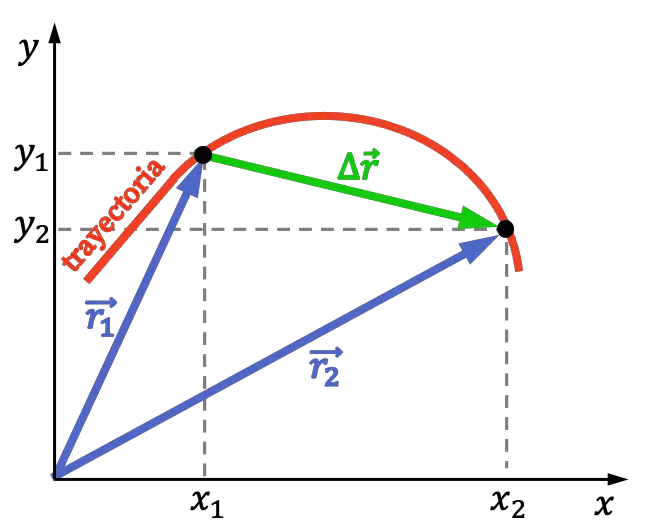
同様に、ルートの移動も区別する必要があります。経路は移動した経路の全長を指し、変位は最終位置から最終位置までの距離を指します。したがって、パスはオフセットよりも大きくなる可能性があります。