この記事では、物理学における等速円運動(または等速円周運動)とは何かについて説明します。そこで、等速円運動の特徴や等速円運動の公式が分かります。
等速円運動 (UCM) とは何ですか?
物理学では、均一円運動 (UCM) は、均一円周運動とも呼ばれ、一定の角速度と半径で軸の周りを回転する物体によって記述される運動です。したがって、等速円運動をする物体は円軌道を持ちます。
たとえば、地球を周回する衛星の軌道は等速円運動 (UCM) と考えることができます。同様に、観覧車、車の車輪、または一定の角速度で回転する扇風機に座っている人も等速円運動の例です。

等速円運動の特徴
等速円運動の特徴は次のとおりです。
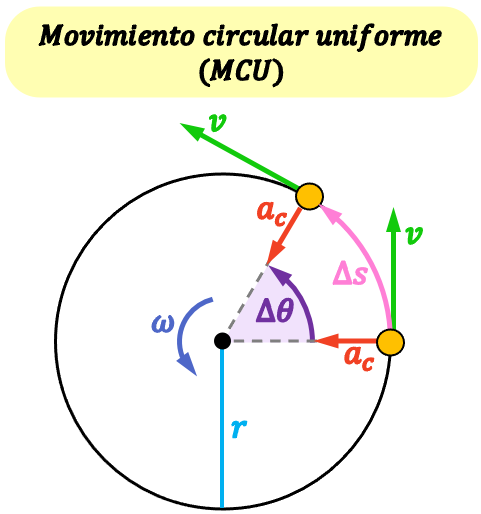
- 等速円運動 (UCM) の主な特徴は、角速度 (ω) が一定であることです。つまり、等速円運動を描く移動体は、その値が変わらない角速度で回転することになります。
- 等速円運動を行う物体の速度 (v) は、円軌道に接します。これが接線速度または線速度と呼ばれる理由です。
- 向心加速度 (または法線加速度) は、携帯電話の速度方向の変化を引き起こす携帯電話の加速度のベクトル成分であり、したがって円軌道の原因となります。向心加速度 (a c ) は接線速度に対して垂直で、円形経路の中心の方向を指します。
- 等速円運動をする移動体の角加速度 (α) と接線加速度 ( at ) は、接線方向の速度が一定であるため、ゼロになります。
- 等速円運動において、周期 (T) は物体が 1 回転するのに必要な時間です。一方、周波数 (f) は、単位時間あたりに体が回転する数です。
等速円運動の公式
等速円運動の定義とその特徴を理解した後、どのような公式を使ってこのタイプの運動の練習問題を解くことができるのかを見ていきます。
角変位
角変位は、円周方向に均一に移動する本体の変位角です。したがって、角変位は、最終角位置と初期角位置との差に等しい。

同様に、角度変位は、直線変位を円形パスの半径で割ることによって計算できます。

金:
-

は角変位です。
-

は最終的な角度位置です。
-

は初期角度位置です。
-

は線形シフトです。
-

は等速円運動の軌道の半径です。
角速度
等速円運動の角速度は、角変位(Δθ)を時間変化(Δt)で割ったものに等しい。したがって、MCU の角速度を求める公式は次のとおりです。

金:
-

は角速度です。
-
は角度位置の増分です。
-

時間増分です。
-
は最終的な角度位置です。
-
は初期角度位置です。
-

最後の瞬間です。
-

最初の瞬間です。
接線速度
等速円運動を表すモバイル デバイスの接線速度 (または線速度) は、角速度に円形経路の半径を掛けた値に等しくなります。したがって、接線速度を計算する式は次のようになります。

金:
-

接線速度です。
-
は角速度です。
-
回転運動パスの半径です。
向心加速度
向心加速度 (または法線加速度) は、接線速度の 2 乗を軌道の半径で割ったものに等しくなります。同様に、向心加速度も、角速度の二乗に軌道の半径を乗じることによって計算できます。

金:
-

は向心加速度 (または法線加速度) です。
-
接線速度です。
-
は円運動の経路の半径です。
-
は角速度です。
期間と頻度
等速円運動において、周期は移動体が 1 回転するのに必要な時間です。一方、周波数は単位時間当たりの身体の回転数です。
したがって、周期と周波数は反比例します。

さらに、等速円運動の角速度、周期、周波数は次の式で数学的に関係付けられます。

金:
-
は角速度です。
-

がポイントです。
-

周波数です。
デカルト座標での位置
等速円運動を表すモバイルの位置は、デカルト座標で表すこともできます。これには、次のパラメトリック方程式が使用されます。
![\begin{cases}x=r\cdot \text{cos}(\theta)\\[2ex]y=r\cdot \text{sin}(\theta)\end{cases}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-b354a316f87c95470a2cacf0717bb3fe_l3.png "Rendered by QuickLaTeX.com")
金:
-

は、モバイルの水平デカルト座標です。
-

は、モバイルの垂直デカルト座標です。
-
は等速円運動の軌道の半径です。
-

携帯電話が置かれている角度です。
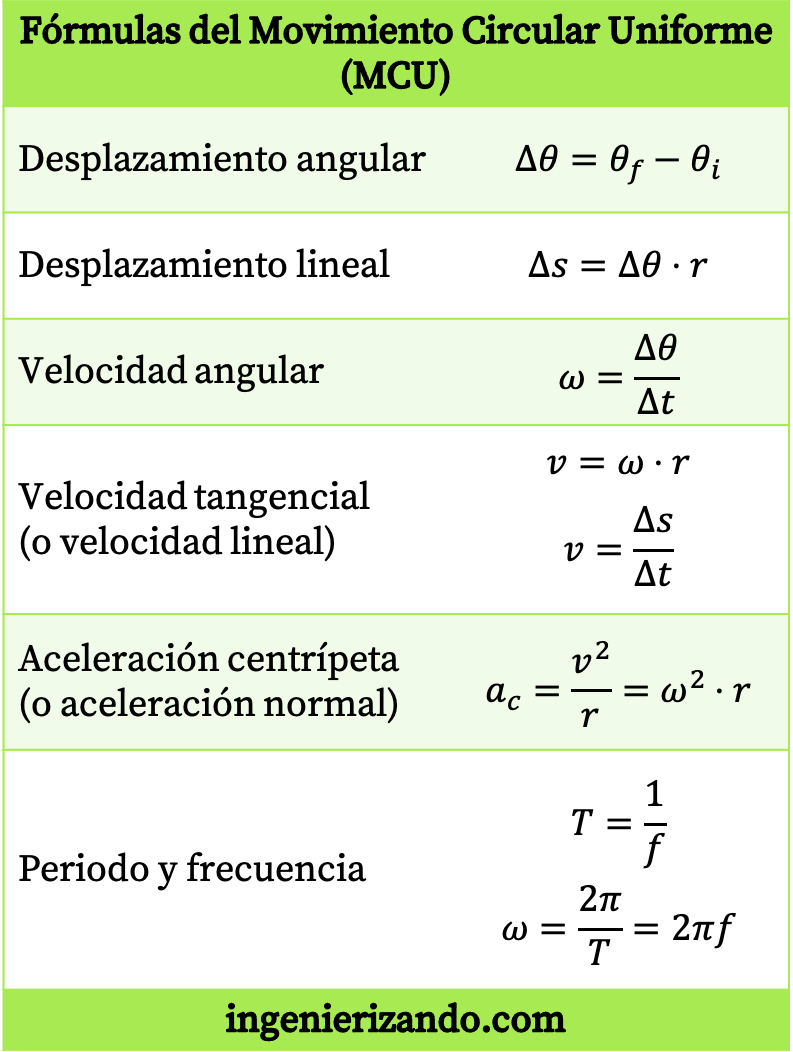
等速円運動の公式まとめ
要約すると、等速円運動 (MCU) のすべての公式が示されている次の表が表示されます。