この記事では、ギア比とは何か、ギア比の計算方法を学び、さらに概念を完全に理解するためのギア比の演習を解決します。
ギア比とは何ですか?
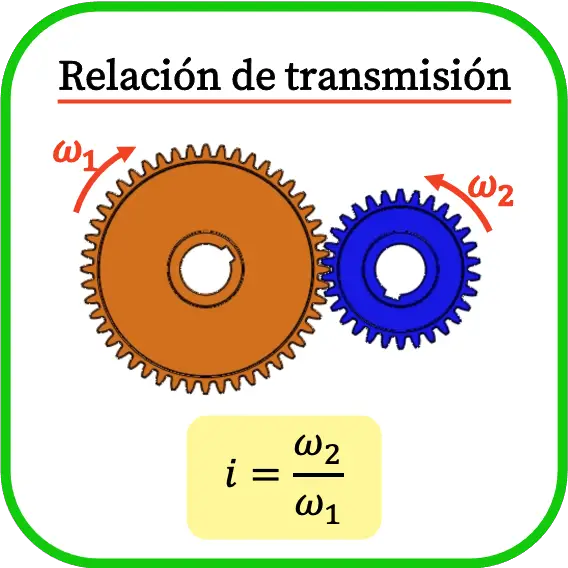
ギア比は2 つのギアの回転速度の比です。具体的には、2 つの歯車の伝達比は、入力歯車の角速度に対する出力歯車の角速度の比として定義されます。
通常、2 つの歯車が接続されている場合、一方の歯車は他方の歯車よりも大きくなります。したがって、2つの車輪の角速度は異なります。つまり、伝達比は2つの車輪の回転速度の関係を示すパラメータです。
主に、ギア比は、ギア システムの回転速度が増減する要因を示すために使用されます。ただし、ギア比の値が低いほど伝達モーメントが大きくなるため、ギア比はシステムの機械的利点も示します。
ギア比の計算式
伝達比の定義を理解した後、このセクションではギアのこの特性パラメータを計算する方法を見ていきます。
伝達比は、出力角速度と入力角速度の比に等しくなります。したがって、ギア比を計算するには、出力ホイールの角速度を入力ホイールの角速度で割る必要があります。
したがって、歯車システムの伝達比を計算する式は次のようになります。
同様に、変速比も車輪の歯数と直径から計算できます。したがって、伝達比の式は次の式に拡張できます。

金:
-

伝達比です。
-

入力ホイールの角速度です。
-

出力ホイールの角速度です。
-

入力ギアの歯数です。
-

出力ギアの歯数です。
-

入力ホイールの直径です。
-

出力ホイールの直径です。
最後に、円運動の伝達におけるエネルギー損失を無視すると、伝達比も入力モーメント (M 1 ) を出力モーメント (M 2 ) で割った値に等しくなります。

ギア比は無次元パラメータ、つまり単位がないことに注意してください。
最後に、伝達比の式から次のことが導き出されます。
- i>1 : ギア比が 1 より大きい場合、出力角速度が入力角速度より大きいことを意味します。したがって、出力歯車の歯数と直径は入力歯車の歯数と直径よりも小さくなります。
- i<1 : ギア比が 1 未満の場合、出力角速度が入力角速度よりも小さいことを意味します。したがって、出力ギアの歯数と直径は入力ギアの歯数と直径よりも大きくなります。
- i=1 : ギア比が 1 に等しい場合、これは出力角速度が入力角速度と等しいことを意味します。したがって、2 つのホイールの歯数と直径は同じです。
歯車列の伝達比
歯車列は、互いに接続された複数の歯車で構成されるシステムです。言い換えれば、歯車列は 2 つ以上の車輪で構成されています。
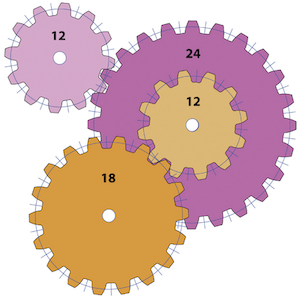
したがって、歯車列の合計歯車比は、歯車対間の歯車比の積に相当します。

同様に、歯車列の全体の歯車比は、駆動輪の歯数を駆動輪の歯数で割ることによって計算できます。したがって、歯車列の歯車比の公式は次のようになります。

アイドラ ギアは駆動輪と従動輪の両方であるため、式の分子と分母の両方に入れる必要があることに注意してください。
たとえば、上記の歯車列伝達比の計算は次のように行われます。

伝達比に関する解決された演習
- 歯数 Z 1 =75 および Z 2 =25 の 2 つの歯車が接続されています。入力ギアが 340 rpm で回転すると、ギア比と出力角速度はどうなりますか?
ギア比の公式を適用すると、入力歯数を出力歯数で割ることでその値を計算できます。

ギア比がわかれば、ギア比の式を使用して出力ホイールの回転速度も求めることができます。

