この記事では物理学ではどのような位置にあるのかを説明します。したがって、物理学における位置の意味、その計算方法、位置と他の物理概念との関係を学びます。
物理学における位置とは何ですか?
物理学では、物体または粒子の位置は、特定の時点での位置です。つまり、物理学では、座標系内で物体の位置を特定するために物体の位置が使用されます。
さらに、物理学では、位置は物体の動きを説明するために使用されます。物体の位置を座標系で表すと、その位置が数値で定義されるため、物体の位置の変化を定義することができます。
したがって、物理学では、物体の位置は位置ベクトルと呼ばれるベクトルで表されます。次のセクションでは、位置ベクトルが何で構成されているかを見ていきます。
位置ベクトル
位置ベクトル、または単に位置ベクトル は、基準系内の点の位置を記述するベクトルです。つまり、位置ベクトルは、座標系内の点の位置を示すために使用されます。
数学的には、点の位置ベクトルは、座標の原点からその点に向かうベクトルとして定義されます。したがって、点の位置ベクトルは、その点の座標から原点座標を減算することによって計算されます。したがって、位置ベクトルの式は次のようになります。

金

は位置ベクトルが計算される点であり、

は参照系の座標の原点です。
点の位置ベクトルの座標は単位ベクトルで表現されます。

、

そして
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ. [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-c04df108648dbd0ef793690ce20b8b96_l3.png "Rendered by QuickLaTeX.com")
たとえば、点のデカルト座標が (3,4,5) である場合、この点の位置ベクトルは r=3i+4j+5k になります。
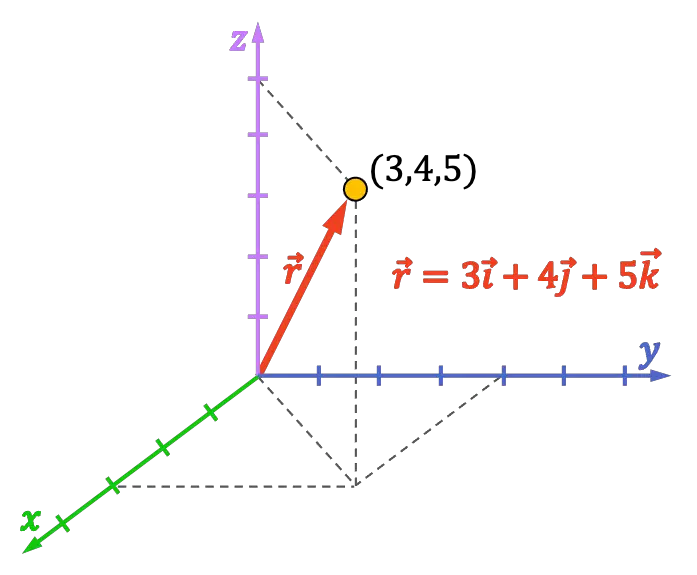
前の例でわかるように、位置ベクトルの方向は基準系の原点と問題の点を結ぶ線であり、一方、位置ベクトルの方向は原点から点に向かう方向です。問題中。勉強のポイント。
点の位置ベクトルの大きさは、その点と座標の原点の間の距離です。したがって、位置ベクトルのノルムは、その座標の二乗の合計の平方根に等しくなります。

平面内で作業する場合、位置ベクトルには 2 つの座標 (x,y) しかないことに注意してください。一方、空間で作業する場合、位置ベクトルには 3 つの座標 (x、y、z) が含まれます。
位置とオフセット
このセクションでは、物理学における変位とは何か、そしてそれが物体の位置にどのように関係するのかを見ていきます。
物理学では、変位とは物体または物体の位置の変化を指します。言い換えれば、物体の変位は、最終位置から初期位置を減算することによって計算されます。したがって、変位を計算する式は次のようになります。

金:
-

は位置ベクトルのオフセットです。
-

は最終位置の位置ベクトルです。
-

は初期位置の位置ベクトルです。
位置と距離
物理学では、 2 点間の距離は、 2 点を結ぶベクトルのノルムです。したがって、変位ベクトルは 2 つの異なる位置を結ぶベクトルであるため、2 点間の距離は、点間の変位ベクトルの大きさを計算することで決定できます。
![d_{AB}=|\Delta \vv{r}_{AB}|=\sqrt{(x_B-x_A)^2+(y_B-y_A)^2(z_B-z_A)^2}[/ latex] Où:
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:5px"> <span style="color:#101010;font-weight: normal;">[latex]d_{AB}” title=”Rendered by QuickLaTeX.com” height=”87″ width=”582″ style=”vertical-align: -5px;”></p>
<p>点Aと点Bの間の距離です。 </p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-75dc5dcfde010c68a3d5e0d59fc3f5b9_l3.png)

は点 A と点 B の間の変位ベクトルです。

は点 A の X、Y、Z 座標です。

は点 B の X、Y、Z 座標です。
ただし、2 点間の距離の概念と移動距離の概念は異なる距離であるため、区別する必要があります。
移動距離とは、ある点から別の点に到達するために物体が移動する長さを指します。つまり、移動距離は、物体がカバーする経路全体です。
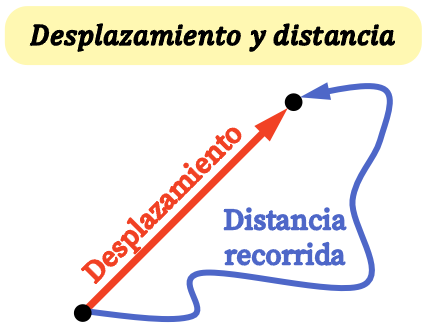
したがって、移動距離と 2 点間の距離の違いは、移動距離は移動する経路全体の長さであるのに対し、2 点間の距離は最終位置と初期位置の間の距離であり、これは次のようになります。変位係数。
位置と速度
最後に、物体の速度は位置方程式から計算できるため、物体の位置と速度の間にどのような関係があるかを見ていきます。
上で見たように、位置ベクトルは、特定の時刻における物体の座標を示すベクトルです。

時間の関数としての物体の瞬間位置の方程式は、任意の瞬間における物体の位置を決定できるようにする公式です。

したがって、物体の瞬間速度の方程式は、瞬間位置の方程式の時間導関数に等しくなります。
*** QuickLaTeX cannot compile formula:
\begin{aligned}\vv{v}(t)&=\cfrac{d\vv{r}(t)}{dt}\\[2ex]\vv{v}(t)&=\ cfrac{dx (t)}{dt}\vv{i}+\cfrac{dy(t)}{dt}\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ end{aligned }
*** Error message:
Package amsmath Error: \begin{aligned} allowed only in math mode.
leading text: \begin{aligned}\vv
Missing $ inserted.
leading text: \begin{aligned}\vv
Undefined control sequence \vv.
leading text: \begin{aligned}\vv
Please use \mathaccent for accents in math mode.
leading text: ...\vv{j}+\cfrac{dz(t)}{dt}\vv{k}\ end{aligned
Missing $ inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing } inserted.
leading text: \end{document}
Missing \cr inserted.
leading text: \end{document}
Missing { inserted.
leading text: \end{document}
Missing $ inserted.
leading text: \end{document}
\begin{aligned} on input line 8 ended by \end{document}.
leading text: \end{document}
You can't use `\end' in internal vertical mode.
したがって、特定の時刻における物体の瞬間速度を計算するには、まずその位置の方程式を導出し、次にその結果の式に時刻の値を代入する必要があります。