この記事では、そのメカニズムとその用途について説明します。したがって、メカニズムの意味、メカニズムの例、およびさまざまなタイプのメカニズムが何であるかがわかります。
メカニズムとは何ですか?
メカニズムとは、人間がより少ない労力でより快適に作業を実行できるようにする一連の機械要素です。
より正確に言うと、メカニズムは、伝達システムのおかげで力や動きを変換する装置です。
したがって、メカニズムの機能は、人間の作業を容易にすることです。なぜなら、メカニズムは、それなしでは非常に困難または不可能でさえある力や動きを生み出すために使用されるからです。

たとえば、車の機構システムでは、アクセルを踏み、ギア レバーを動かすと前に進むことができます。このようにして、車両の機構は人間の作業を前進運動に変換します。
簡単に言うと、機構とは、入力された力または動作を所望の出力の力または動作に変換する機械の部品のセットです。
仕組みの例
メカニズムの定義を理解したら、概念をよりよく理解するためにメカニズムの例をいくつか見ていきます。
- コネクティングロッドクランク機構:直線運動を円運動に、またはその逆に変換するために使用される機構。
- カムフォロア機構:回転運動を振動直線運動に変換する非可逆機構です。
- ウォーム機構: 直交する 2 軸間の回転運動を伝達するために使用される機構。
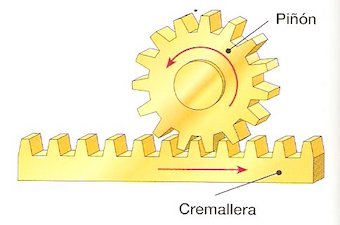
- ラック&ピニオン機構:円運動と直線運動を切り替えられるリバーシブル機構。
- フリクションホイール:摩擦によって回転運動を伝達する機構。
- ホイスト: 重量物を快適に取り扱うための一連の滑車からなる機構。
- スプロケット: 2 つの車軸間で角速度と動力を伝達するために使用される機構。
機構の種類
直線伝達機構
線形伝達機構は、直線運動を加え、それに応じて別の直線運動を生成する機構です。したがって、このタイプの機構は直線運動を伝達します。
例えば、レバーは、その一方の端が下方に移動(直線運動)することにより、荷重を受けたもう一方の腕が上方に移動(直線運動)するという動作をするため、線形伝達機構となります。したがって、直線的な動きを伝達する機構です。
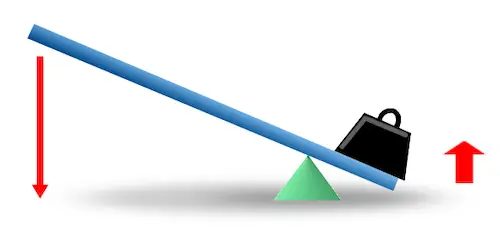
一般に、このタイプの機構では入力力を変更できるため、加えられた力よりもはるかに大きな力を加えることができます。前の例に続き、はかりを使用すると、機械器具を使わずに重量物を持ち上げる場合よりも少ない力で重い物体を持ち上げることができます。
循環伝達機構
円形伝達機構は、入力側で円運動をし、出力側でも円運動をする機構です。したがって、このタイプの機構は回転運動を伝達します。
したがって、円形駆動機構と直線駆動機構の違いは、伝達する運動の種類にすぎません。円形伝達機構は回転運動を伝達し、直線伝達機構は直線運動を伝達します。
たとえば、ベルトでリンクされたプーリー システムは、入力プーリーの回転運動が出力プーリーに伝達されるため、円形伝動機構となります。

このような機構には角速度を変化させる機能があり、円運動を伝達する際に回転速度を適宜増減させます。
これを行うには、入力ホイールの直径と出力ホイールの直径を調整します。入力直径が出力直径よりも大きい場合、角速度は増加します。一方、入口の直径が小さい場合は、角速度が増加します。出口直径よりも角速度が減少します。
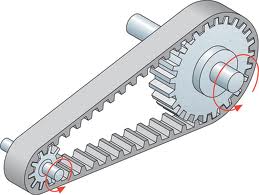
チェーン付きスプロケット (チェーン・スプロケット機構) も円形伝動機構です。チェーンの利点は効率が高いことですが、ベルトに比べて柔軟性が劣ることです。
最後に、歯車は歯が噛み合う歯車であるため、円形の伝達機構でもあり、したがって円運動が一方の歯車からもう一方の歯車に伝達されます。
歯車には主に、軸が平行な直歯車、軸が直交するかさ歯車、歯がはすば状のはすば歯車の3種類があります。
平歯車

かさ歯車

はすば歯車

運動変換メカニズム
モーション変換メカニズムは入力モーションを別のタイプのモーションに変換するため、入力モーションと出力モーションは異なります。
基本的に、これらのタイプの機構は円運動を直線運動に変換したり、逆に円運動を直線運動に変換したりします。
たとえば、カムフォロア機構は円運動を往復直線運動に変換するために使用されます。このタイプのメカニズムは不可逆的です。つまり、円運動から直線運動への移行は可能ですが、その逆は不可能です。
同様に、ラックアンドピニオン機構は、前進運動を回転運動に変換するために使用されます。このタイプの機構は可逆的であるため、円運動を直線運動に変換することもできます。
メカニズムの機械的利点
機構の機械的利点は、機構の入力力に対する出力力の比率です。したがって、メカニカルアドバンテージは、出力力と入力力の比に等しくなります。
したがって、メカニズムの機械的利点を計算する式は次のとおりです。

機構の機械的利点は、加えられる力の速度を負荷の移動速度で割ることによって計算することもできます。同様に、この式は、加えられた力の点の変位を荷重の変位で割ったものと等価です。

金:
-

機械的な利点です。
-

は出力力です。
-

は入力力です。
-

入力速度です。
-

脱出速度です。
-

エントリが移動した距離です。
-

出力が移動する距離です。
一方、力ではなくモーメントを伝達したい場合、機械的利点は出力モーメントを入力モーメントで割ることによって計算されます。たとえば、ホイール ギアの機械的利点は、伝達されるモーメントの比率によって測定されます。

金:
-
機械的な利点です。
-

リリース時間です。
-

入場時間です。
-

は入力角速度です。
-

は出口角速度です。
次に、メカニカル アドバンテージの式から、次の関係が導き出されます。
- VM>1 : 出力される力が加えられる力よりも大きいため、機構により力の大きさが増加します。一方、荷重が移動する距離は、力が加えられた点が移動する距離よりも短くなります。
- VM<1 : 出力される力は加えられる力よりも小さいため、機構により力の値が減少します。ただし、力を加えた時点での変位よりも大きな荷重の変位が得られます。
- VM=1 : 機構の出力は機構に加えられる力に等しい。荷重の変位と力の作用点も同じです。この種の機構には機械的な利点はありませんが、より快適に力を加えるためによく使用されます。たとえば、単純な滑車を使用すると、下向きの力でおもりを持ち上げることができるため、荷物を持ち上げやすくなります。
機構の自由度
機構の自由度は、機構の運動学的状態を完全に定義するために必要な一般化された速度の数です。
したがって、機構の自由度の数は次の式を使用して計算されます。

金:
-

は機構の自由度の数です。
-

機構を構成するソリッドまたは要素の数です。
-

は各固体の自由度の数です。機構を 2 次元で研究する場合、各固体には 3 つの自由度がありますが、3 次元で研究する場合、各固体には 6 つの自由度があります。
-

は、リンクkによって課される制約の数です。
機構の自由度は、機構の動きを記述するために必要な方程式の数と一致するため、機構の動きを定義するための重要なパラメータであることに注意してください。