この記事では、メカニカルバランスとは何かをいくつかの例を挙げて説明します。さまざまなタイプのバランスも見つかり、さらに、段階的に解決されるエクササイズで練習することもできます。
メカニカルバランスとは何ですか?
機械的平衡とは、物体に加えられる力とモーメントの合計がゼロに等しいときの定常状態です。

したがって、システムが平衡状態になるには 2 つの条件を満たす必要があります。バランスの最初の条件は、各軸の力の合計がゼロでなければならないことを確立します。

同様に、2 番目の平衡条件は、システムが平衡状態にあるとみなされるためには、各軸のモーメントの合計がゼロでなければならないことを示しています。

これら 2 つの平衡の法則が尊重される場合、物体には直線加速度も角加速度も存在しないことを意味します。したがって、物体は静止しているか、一定の線速度で移動しているか、または一定の角速度で回転しています。
物理学では、物体が機械的平衡にあるとき、並進および回転の平衡にある、または単に平衡にあるとも言います。
これは機械的バランスが何であるかを説明する 1 つの方法であり、私の観点から最も単純ですが、以下では機械的バランスを定義する別の方法を見ていきます。
メカニカルバランスの例
機械的スケールの定義を考慮して、概念をよりよく理解するために、以下に機械的スケールのいくつかの例を示します。
- 機械的天秤の例としては、天井から吊り下げられたランプが挙げられます。ランプを支持するために加えられる力がその重量の力に対抗するため、ランプは静止しており、したがって機械的に平衡の位置にあります。
- 機械スケールの別の例は、重量計です。テンプアームの回転が停止すると、テンプアームにかかるモーメントの合計がゼロになり、機械的に平衡状態にあることを意味します。
- 機械的平衡の最後の例として、一定の速度で移動する自動車を使用できます。車が一定の速度で移動している場合、それは加速度がゼロであることを意味し、したがって力とモーメントの合計はゼロになります。したがって、機械的に平衡状態にあります。
スケールの種類
機械的てんびんには、安定したてんびん、不安定なてんびん、無関心なてんびんの 3 つの異なるタイプのてんびんがあります。
- 安定平衡: 物体は移動後に元の位置に戻るとき、安定した平衡状態にあります。例えば振り子。
- 不安定な平衡: 力によって押しのけられた後、平衡位置を見つけることができない場合、物体は不安定な平衡状態にあります。たとえば、鉛筆を垂直に持ちます。
- 無関心平衡(または中立平衡): 物体が平衡位置を失ったときに、新しい異なる平衡位置を見つけた場合、物体は無関心平衡にあります。たとえば、地面に置かれた大理石。
機械的バランスと位置エネルギーの関係
以下で説明するように、機械的バランスは数学的に位置エネルギーに関連しています。したがって、機械的平衡の意味は、理解するのが少し難しくなりますが、位置エネルギーによっても説明できます。
システムは、その点での位置エネルギーの一次導関数がゼロに等しい点で機械的平衡にあります。
同様に、二次導関数の符号に応じて、それがどのタイプの平衡であるかを区別できます。
- 安定平衡: その点の位置エネルギーの二次導関数が正の場合、その点は安定平衡にあります。つまり、この時点で位置エネルギー関数が最小値を持つ場合です。
- 不安定平衡: その点の位置エネルギーの二次導関数が負の場合、その点は不安定平衡にあります。つまり、位置エネルギー関数がこの時点で最大値を持つ場合です。
- 無関心平衡: この点の位置エネルギーの二次導関数がゼロの場合、点は無関心平衡にあります。
メカニカルバランス演習が解決されました
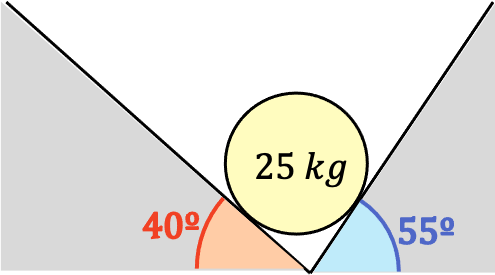
機械的平衡状態で質量 25 kg の次の円柱を支えるために各傾斜面が及ぼさなければならない力を計算します。運動中は摩擦を無視してください。
すべての静力学問題と同様、問題を解決するには、まずシステムの自由体図を作成する必要があります。
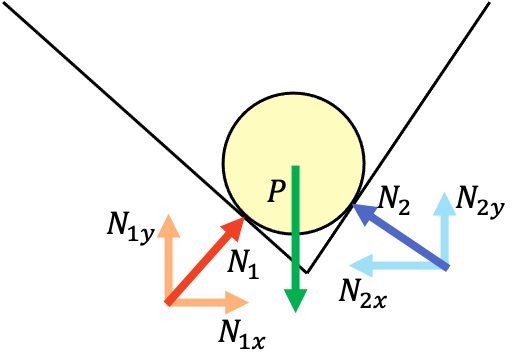
示される力N 1x 、N 1yおよびN 2x 、N 2yは、それぞれ力N 1およびN 2の成分であることに留意されたい。




したがって、システムが機械的平衡状態にあるためには、次の 2 つの方程式が満たされる必要があります。


最初の方程式から、2 つの平面の力には次の関係があることが推測できます。




次に、2 番目の方程式の変数を式に置き換えてみましょう。



そして、最初の方程式で見つかった関係を代入して、力 N 2の値を求めます。




そして最後に、力間の関係で見つかった値を代入して決定します。 1位:
