この記事では平衡状態とは何かについて説明します。両方のバランス状態の実際の例が見つかり、さらに、段階的に解決される演習でトレーニングすることができます。
平衡条件とは何でしょうか?
物理学における平衡条件では、物体に加えられる力の合計とモーメントの合計がゼロに等しい場合、物体は平衡状態にあるとされます。
したがって、平衡には 2 つの条件があります。1 つ目の条件は、合力がゼロでなければならないことを示し、2 つ目の条件は、合力モーメントがゼロでなければならないことを示します。
システムが平衡状態にあるとみなされるには、両方の方程式が満たされる必要があり、1 つの条件だけが満たされるだけでは十分ではないことに留意してください。
バランスの第一条件
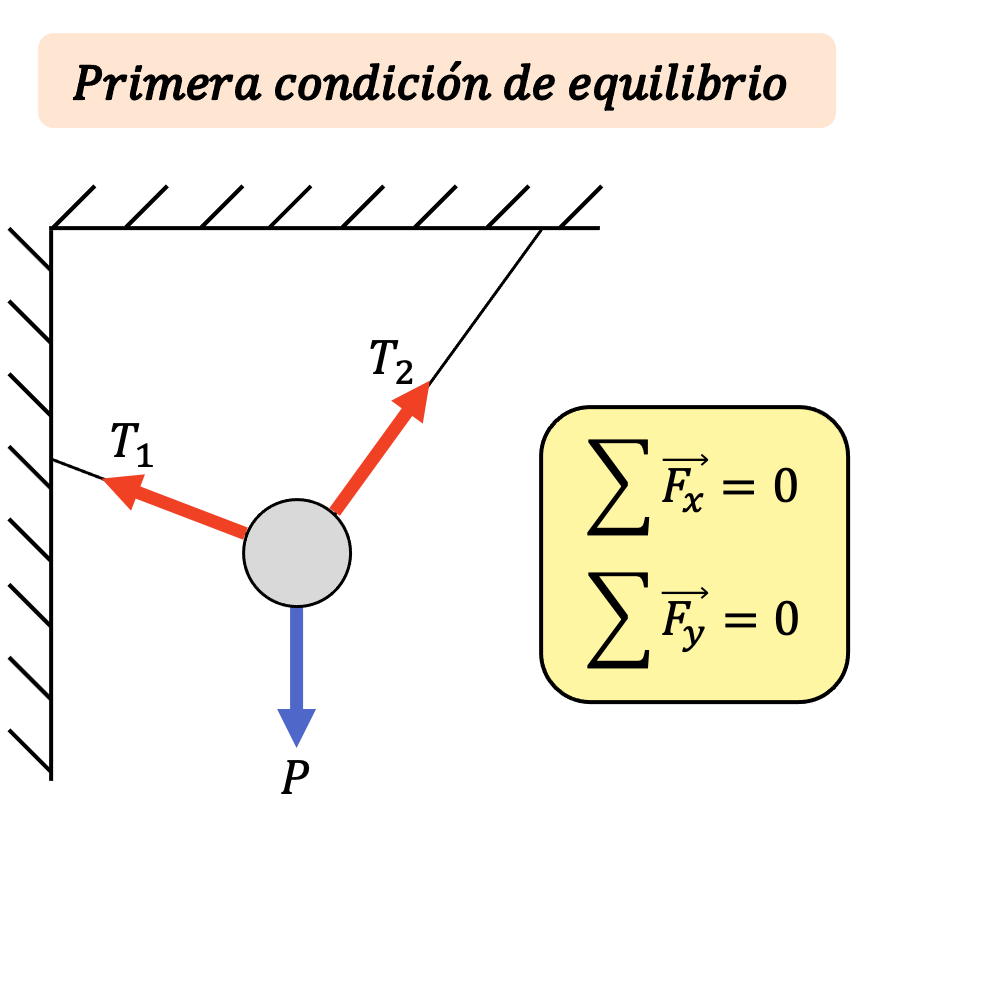
最初の平衡条件は、物体が並進平衡状態にあるためには、物体に加えられる力の合計がゼロに等しくなければならないことを示しています。
論理的には、力の合計は 3 つの軸すべてでゼロでなければなりません。どの軸でも力の合計が満たされない場合、体のバランスは崩れています。

さらに、力の合計がゼロの場合、物体には直線加速度が存在しないことを意味します。したがって、並進平衡状態にある物体は、静止している (速度ゼロ) ことも、一定の線形速度で移動していることもできます。
そこから、2 種類の並進平衡を区別できます。
- 静的並進平衡:最初の平衡条件が満たされ、体も静止しているとき。
- 動的並進平衡: 最初の平衡条件が満たされ、物体の速度が一定 (ゼロとは異なる) のとき。
2 番目の平衡状態
2 番目の平衡状態は最初の平衡状態に似ていますが、力の代わりにモーメントを使用します。
2 番目の平衡条件は、物体のモーメントの合計がゼロの場合、物体は回転平衡状態にあることを示します。
同様に、モーメントの合計はフレームのすべての軸でゼロでなければなりません。そうでない場合、2 番目の平衡条件は検証されません。

ある点における力のモーメント (またはトルク) は、力の値に力からその点までの垂直距離を乗じることによって計算されることに注意してください。

同様に、2 番目の平衡条件が満たされるには、物体の角加速度がゼロでなければなりません。これは、この状態では物体が回転していないか、または一定の角速度で回転していることを意味します。
平衡状態の例
2 つの平衡状態の定義を確認した後、以下の日常生活からのいくつかの例を見て、概念を完全に理解できるようになります。
たとえば、物体が天井から吊り下げられている場合、システムは完全に静止しているため、物体はバランスが取れています。システムは静的平衡状態にあるとも言えます。
日常生活におけるバランス状態のもう 1 つの例は、体重計です。バランス アームが安定して回転が停止すると、システムは静止しており、バランスも取れています。
平衡条件の問題を解決しました
演習 1
質量 12 kg の剛体が、次の図に示す角度の 2 本のロープで吊り下げられているとすると、体の平衡を保つために各ロープが及ぼす必要のある力を計算します。
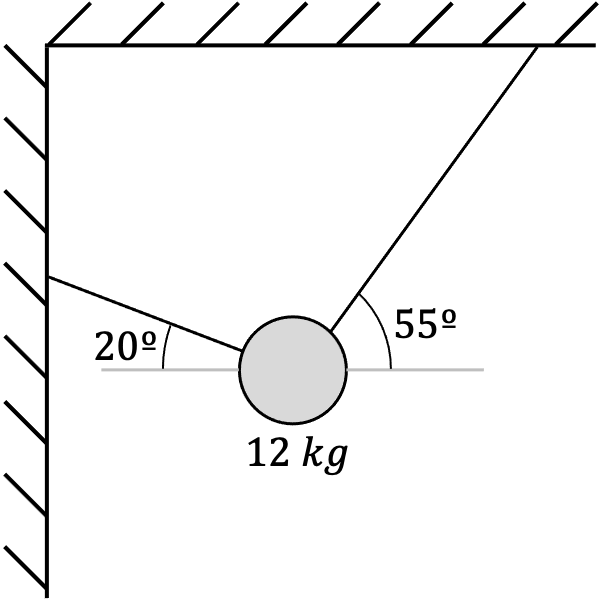
この種の問題を解決するために最初に行う必要があるのは、Figure の自由体図を描くことです。
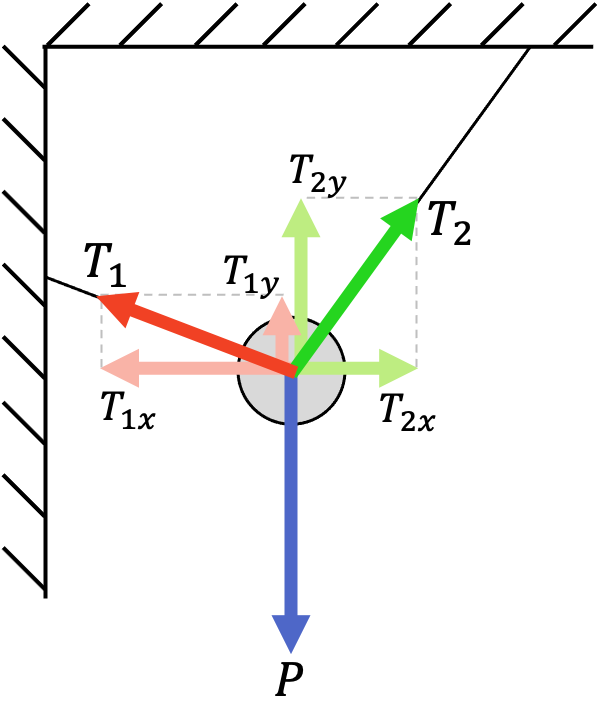
実際には、吊り下げられた物体に作用する力は、重り P の力と弦 T 1と T 2の張力の 3 つだけであることに注意してください。 T 1x 、T 1y 、T 2xおよびT 2yで表される力は、それぞれT 1およびT 2のベクトル成分である。
したがって、弦の傾斜角度がわかっているので、張力のベクトル成分の式を見つけることができます。




一方、重力の力は、重力の公式を適用して計算できます。

問題文は、物体が平衡状態にあるため、垂直方向の力の合計と水平方向の力の合計はゼロに等しくなる必要があることを示しています。したがって、力の方程式を確立し、それらをゼロに等しく設定できます。


ここで、制約のコンポーネントを、前に見つけた式で置き換えます。


そして最後に、連立方程式を解いて力 T 1と T 2の値を取得します。
![\left.\begin{array}{l}-T_1\cdot 0,94+T_2\cdot 0,57=0\\[2ex]T_1\cdot 0,34+T_2\cdot 0,82-117 .72=0\end{array }\right\} \longrightarrow \ \begin{array}{c}T_1=69,56 \ N\\[2ex]T_2=114,74 \ N\end{array}[/ latex]
<div class="wp-block-otfm-box-spoiler-end otfm-sp_end"></div>
<h3 class="wp-block-heading"> Exercice 2</h3>
<p> Calculer le moment que doit faire le support de la poutre suivante pour qu’elle soit en équilibre de rotation : </p>
<div class="wp-block-image">
<figure class="aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png" alt="Exercice résolu de la deuxième condition d'équilibre" class="wp-image-397" width="237" height="203" srcset="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre-300x257.png 300w, https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png 643w" sizes="(max-width: 300px) 100vw, 300px"></figure>
</div>
<div class="wp-block-otfm-box-spoiler-start otfm-sp__wrapper otfm-sp__box js-otfm-sp-box__closed otfm-sp__FFF8E1" role="button" tabindex="0" aria-expanded="false" data-otfm-spc="#FFF8E1" style="text-align:center">
<div class="otfm-sp__title"> <strong>Voir la solution</strong></div>
</div>
<p> Pour que la poutre soit en équilibre de rotation et que la deuxième condition d’équilibre soit donc remplie, le support doit contrecarrer le moment de torsion généré par la force, donc la somme des moments sera nulle. On calcule donc le moment (ou couple) généré par la force au niveau de l’appui : [latex]M_{force}=13\cdot 9 = 117 \ Nm” title=”Rendered by QuickLaTeX.com” height=”343″ width=”3353″ style=”vertical-align: 0px;”></p>
</p>
<p class=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-694655a52049a536489cebbaef3bc7a2_l3.png) そしてモーメントバランス方程式を述べます:
そしてモーメントバランス方程式を述べます:

力を生成するモーメントは画面内を通過するため、その符号は負になります。

そして最後に、方程式内の未知数を解きます。

得られた瞬間は正の符号を持ち、したがってその意味は画面の外にあります。
演習 3
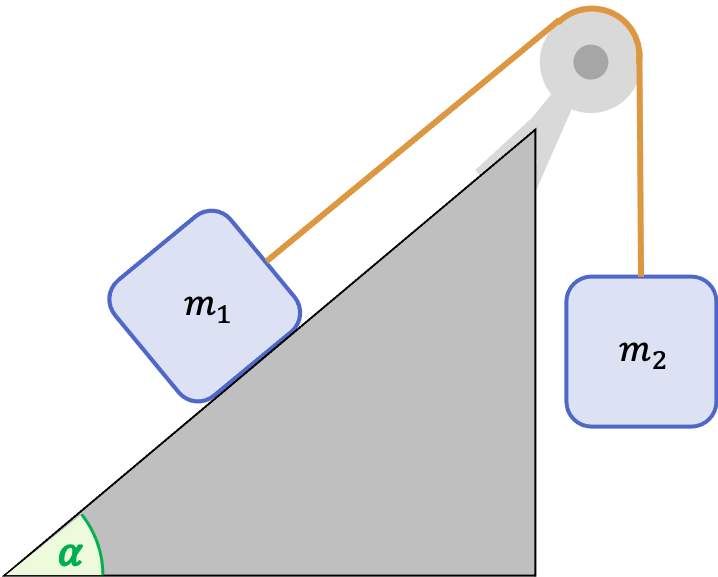
次の図に示すように、2 つのオブジェクトはロープと無視できる質量の滑車によって接続されています。物体 2 の質量が 7 kg で、ランプの傾斜が 50 度の場合、システム全体が平衡状態になるように物体 1 の質量を計算します。この場合、摩擦力は無視できます。
ボディ 1 は傾斜した斜面上にあるため、最初に行うことは、その重量の力をベクトル化して斜面の軸に力を持たせることです。


したがって、システム全体に作用する一連の力は次のようになります。
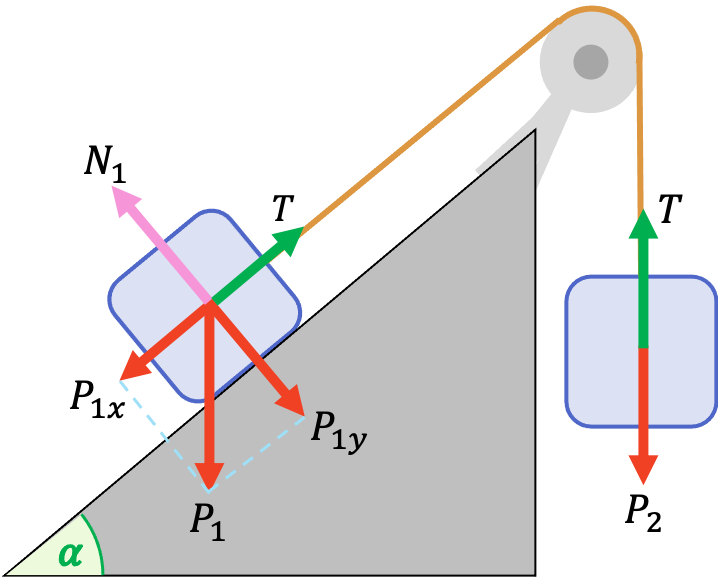
問題文は、力の系が平衡状態にあることを示しているため、2 つの物体は平衡状態にある必要があります。この情報から、2 つの物体の平衡方程式を定式化できます。
![1\ \rightarrow \ \begin{cases}P_{1x}=T\\[2ex]P_{1y}=N\end{cases} \qquad\qquad 2 \ \rightarrow \ T=P_2[/latex ] Ainsi, la composante du poids de l'objet 1 incliné dans le sens de la pente doit être égale au poids de l'objet 2 : [latex]P_{1x}=P_2](https://physigeek.com/wp-content/ql-cache/quicklatex.com-ed082b4f064316ab20fb0d26054d3010_l3.png "Rendered by QuickLaTeX.com")

次に、重力の公式を適用して方程式を簡略化します。


最後に、データを代入して、物体 1 の質量を求めます。



演習 4
次の図からわかるように、10 m の水平棒が質量 8 kg の物体を支えます。サポートと吊り下げられた本体の間の距離がわかった場合、システムが回転と並進のバランスにある場合、サポートによって発揮される力の値はいくらですか?
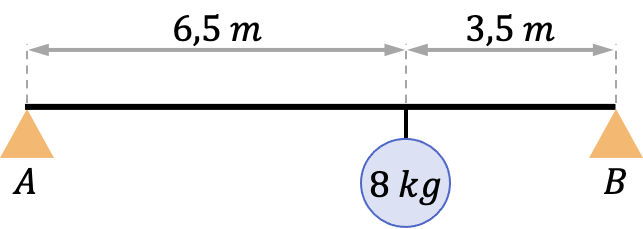
まず、重力の公式を使用して、水平バーが支えなければならない重量を計算します。

したがって、システムの自由体図は次のようになります。
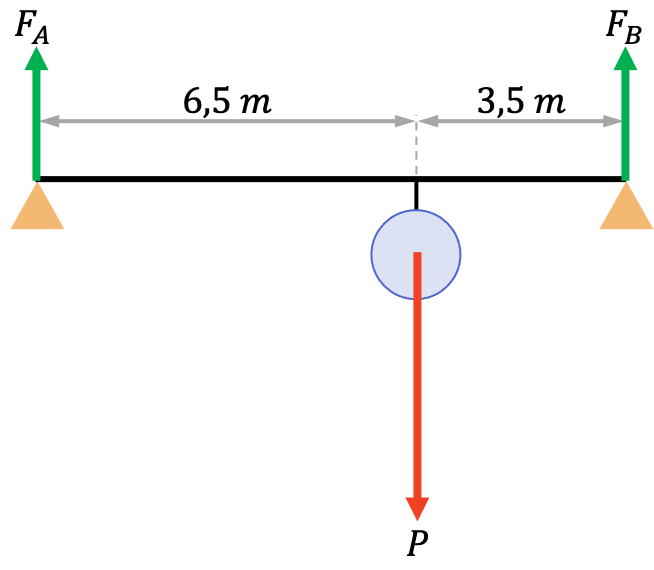
問題文は、システムが力のバランスにあるため、これらすべての力の合計がゼロになる必要があることを示しています。この平衡条件を使用すると、次の方程式を定式化できます。

一方で、このステートメントは、システムが運動量の均衡にあることも示しています。したがって、システム内の任意の点のモーメントの合計を考慮すると、結果はゼロになるはずです。また、2 つのサポートのうちの 1 つの基準点を取ると、未知数が 1 つある方程式が得られます。


方程式の未知数を解くことで、サポート B によって発揮される力を計算できます。



そして最後に、得られた値を垂直力の方程式に代入することで、他のサポートに加えられる力の強さを知ることができます。

