この記事では、物理学における変位ベクトルとは何かについて説明します。したがって、変位ベクトルの計算方法と、概念を適切に理解するための解決された演習がわかります。
変位ベクトルとは何ですか?
変位ベクトルは、初期位置から最終位置に向かうベクトルとして定義されます。つまり、変位ベクトルは物体の位置の変化を表すベクトルです。変位ベクトルは、最終位置ベクトルから初期位置ベクトルを減算することによって計算されます。
変位ベクトルの適用点は物体の初期位置を定義する点であり、変位ベクトルの終点は物体の最終位置を示す点です。したがって、物理学では、変位ベクトルは物体の初期位置と最終位置の差を示すベクトルです。
変位ベクトル シンボルは次のとおりです。

。
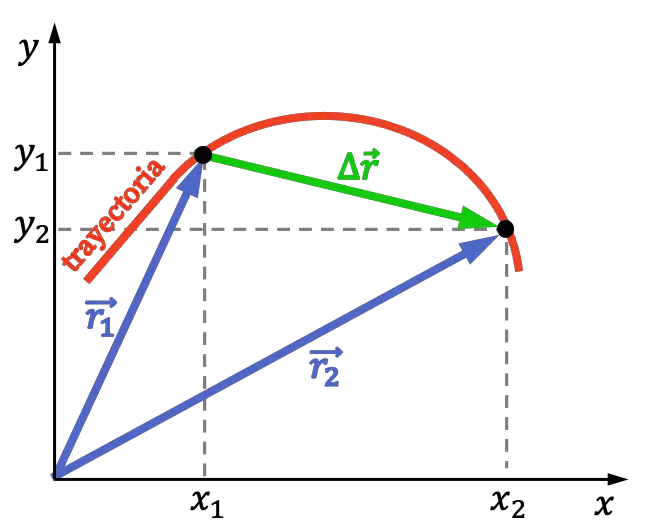
変位は軌道とは異なることに注意してください。軌跡は移動体が移動する経路全体ですが、変位ベクトルは初期位置と最終位置の間の変化のみを示します。
変位ベクトル式
変位ベクトルは、最終位置ベクトル (r f ) と初期位置ベクトル (r i ) の差に等しい。したがって、変位ベクトルは、最終位置ベクトルから初期位置ベクトルを減算することによって計算されます (Δr = r f -r i )。
したがって、変位ベクトルを計算する式は次のようになります。

2 座標系で作業している場合、各位置ベクトルには 2 つの成分があることに注意してください。したがって、2 つのベクトルの減算を計算するには、それらの座標を減算する必要があります。
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(x_f\vv{i }+y_f\vv{j}\right)-\left(x_i\vv{i}+y_i\vv{j}\right)\\[3ex]\Delta\vv{r}&=(x_f-x_i) \vv{i}+(y_f-y_i)\vv{j}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9de158fd25fcb5e34f8c8a8b2ea945ce_l3.png "Rendered by QuickLaTeX.com")
金:
-
は変位ベクトルです。
-

は最終瞬間の位置ベクトルです。
-

は最初の瞬間の位置ベクトルです。
-

はそれぞれ最終位置の X、Y 座標です。
-

はそれぞれ初期位置の X、Y 座標です。
-

は、それぞれ OX 軸と OY 軸の方向を表す単位ベクトルです。
注:空間で作業する場合、ベクトルには 3 つの座標があります。この場合、ベクトルの Z 座標を式に追加し、3 つの座標を操作する必要があります。
変位ベクトルの係数
変位ベクトルの大きさは、最終位置と初期位置の間の距離です。したがって、2 点間の距離を決定するには、これら 2 点間の変位係数を計算する必要があります。
変位ベクトルのノルムは、その成分の二乗和の平方根に等しくなります。したがって、変位ベクトルの係数を計算する式は次のとおりです。

金:
-

は変位ベクトルのノルムです。
-
はそれぞれ最終位置の X、Y 座標です。
-
はそれぞれ初期位置の X、Y 座標です。
移動距離は 2 点間の実際の距離よりも長い場合があるため、2 点間の距離 (これらの点間の変位ベクトルの大きさ) は移動距離と同じではないことに注意してください。
変位ベクトルの計算例
変位ベクトルの定義とその式が何であるかを理解したら、このセクションでは、変位ベクトルがどのように計算されるかを、例を段階的に解いて見ていきます。
- 粒子がその位置にあります

最初の瞬間と一定の時間が経過した後、位置は
 になります。変位ベクトルとこれら 2 つの位置間の距離はいくらですか?
になります。変位ベクトルとこれら 2 つの位置間の距離はいくらですか?
最終位置と初期位置の間の変位ベクトルを決定するには、単に 2 つの位置ベクトルを減算します。
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(5\vv{i }+1\vv{j}\right)-\left(3\vv{i}-2\vv{j}\right)\\[3ex]\Delta\vv{r}&=\bigl(5- 3\bigr)\vv{i}+\bigl(1-(-2)\bigr)\vv{j}\\[3ex]\Delta\vv{r}&=2\vv{i}+3\ vv{j}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-3444222027ce5b4d04745c6beaa286f5_l3.png "Rendered by QuickLaTeX.com")
次に、これら 2 点間の距離を見つけるには、計算された変位ベクトルのノルムを取得する必要があります。
![\begin{aligned}|\Delta \vv{r}|&=\sqrt{2^2+3^2}}\\[3ex]|\Delta \vv{r}|&=\sqrt{ 4+9}\\[3ex]|\Delta \vv{r}|&=\sqrt{13}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-e1bf43dbb25c4179e4c8a79fddb56285_l3.png "Rendered by QuickLaTeX.com")
変位ベクトルと位置ベクトル
最後に、変位ベクトルと位置ベクトルの違いを確認します。同様に、これら 2 種類のベクトル間の関係を確認します。
位置ベクトル は、位置ベクトルとも呼ばれ、基準系に対する点の位置を表すベクトルです。したがって、物理学では、位置ベクトルは座標系内の点の位置を示すために使用されます。
したがって、位置ベクトルは点の位置を定義し、一方、変位ベクトルは 2 つの瞬間間の位置ベクトルの変化を示すため、変位ベクトルと位置ベクトルはリンクされます。