Questo articolo spiega cos’è il vettore posizione in fisica. Scoprirai così quali sono le proprietà del vettore posizione, come calcolare il vettore posizione di un punto e, passo dopo passo, anche un esempio concreto.
Cos’è un vettore di posizione?
Un vettore di posizione , o semplicemente un vettore di posizione , è un vettore che descrive la posizione di un punto rispetto a un sistema di riferimento. Cioè, il vettore di posizione viene utilizzato per indicare la posizione di un punto in un sistema di coordinate.
Matematicamente il vettore posizione di un punto è definito come il vettore che va dall’origine delle coordinate a quel punto. Pertanto, il vettore posizione di un punto viene calcolato sottraendo le coordinate di quel punto meno le coordinate dell’origine.

In generale, il vettore posizione è espresso dai vettori unitari

,

E
![\vv{k}[/latex ] , qui correspondent respectivement aux coordonnées des axes X, Y et Z. Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k.
<figure class="wp-block-image aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png" alt="vecteur de position" class="wp-image-7644" width="374" height="308" srcset="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position-300x247.png 300w, https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png 697w" sizes="(max-width: 300px) 100vw, 300px"></figure>
<h2 class="wp-block-heading"><span class="ez-toc-section" id="Caracteristicas-del-vector-de-posicion"></span> Caractéristiques du vecteur de position<span class="ez-toc-section-end"></span></h2>
<p> Maintenant que nous connaissons la définition du vecteur position, voyons quelles sont ses caractéristiques.</p>
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:20px"> <span style="color:#101010;font-weight: normal;">Le vecteur position d’un point est défini comme la différence entre les coordonnées de ce point et l’origine des coordonnées. Par conséquent, la formule pour calculer le vecteur position d’un point est la suivante :</span></li>
<p> [latex]\vv{r}=PO” title=”Rendered by QuickLaTeX.com” height=”438″ width=”1546″ style=”vertical-align: -5px;”></p>
</p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-493ea824d13cdf2c289249ee201f0079_l3.png) Le coordinate del vettore posizione di un punto sono espresse dai versori
Le coordinate del vettore posizione di un punto sono espresse dai versori
,
E
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ.</span></li>
<p> [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}” title=”Rendered by QuickLaTeX.com” height=”41″ width=”616″ style=”vertical-align: -5px;”></p>
<p> <span style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9a41deb220b0257eea947e8a946f9a2f_l3.png) La direzione del vettore posizione è la linea che collega l’origine della boa al punto considerato.
La direzione del vettore posizione è la linea che collega l’origine della boa al punto considerato.

Si noti che il vettore posizione avrà solo due coordinate (x,y) se lavoriamo nel piano. Se invece lavoriamo nello spazio, il vettore posizione avrà tre coordinate (x,y,z).
Esercizio sul vettore di posizione risolto
Per comprendere bene il concetto, di seguito è riportato un esercizio risolto su come viene calcolato il vettore posizione.
- Il vettore posizione rispetto al tempo di un corpo è definito dall’espressione seguente. Calcolare il vettore posizione del corpo al tempo t=3 s ed il suo modulo.

Per trovare il vettore posizione al tempo t=3 s è necessario sostituire il parametro t con il suo valore ed eseguire i calcoli:
![\begin{aligned}\vv{r}(3)&=4\cdot 3\vv{i}+2\cdot 3^2\vv{j}+5 \vv{k}\\[2ex ]\vv{r}(3)&=12\vv{i}+18\vv{j}+5\vv{k}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-dec24ff071b35d8e731e7a0a66d6c0e0_l3.png "Rendered by QuickLaTeX.com")
Quindi restituiamo il modulo del vettore di posizione calcolando la radice quadrata della somma dei quadrati delle coordinate:
![\begin{aligned}|\vv{r}(3)|&=\sqrt{12^2+18^2+5^2}\\[2ex]|\vv{r}(3)| &=\sqrt{493}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-8c09dc9fc6db4d03b23adfc1b44c8168_l3.png "Rendered by QuickLaTeX.com")
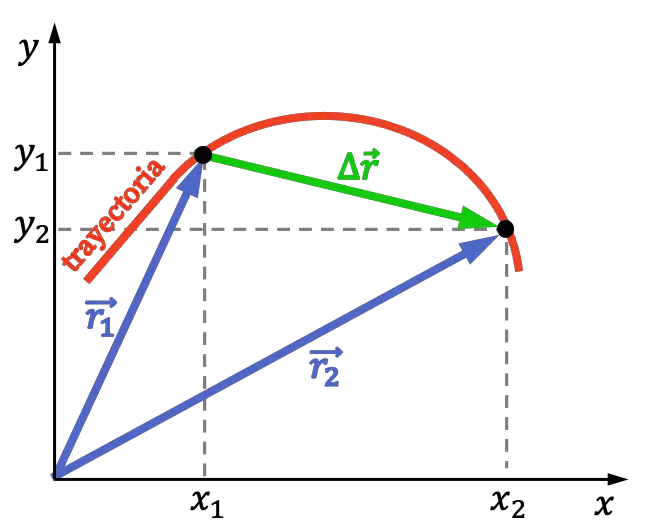
Vettore posizione e spostamento
L’ offset di un punto è definito come la distanza tra il punto finale e il punto iniziale. Pertanto il vettore spostamento è il vettore ottenuto sottraendo il vettore posizione finale meno il vettore posizione iniziale.

Pertanto, la differenza tra il vettore posizione e lo spostamento è che il vettore posizione indica la posizione di un corpo in un dato istante, mentre il vettore spostamento indica la distanza tra due diverse posizioni di un corpo in movimento.
Allo stesso modo, il movimento del percorso deve essere differenziato. Il percorso si riferisce alla lunghezza totale del percorso percorso, mentre lo spostamento si riferisce alla distanza dalla posizione finale alla posizione finale. Il percorso può quindi essere maggiore dell’offset.