Artikel ini menjelaskan apa itu keseimbangan mekanik dengan beberapa contoh. Anda juga akan menemukan berbagai jenis keseimbangan dan, sebagai tambahan, Anda akan dapat berlatih dengan latihan yang diselesaikan selangkah demi selangkah.
Apa itu keseimbangan mekanis?
Kesetimbangan mekanik adalah suatu keadaan diam dimana suatu benda berada pada keadaan ketika jumlah gaya dan momen yang diterapkan padanya sama dengan nol.

Oleh karena itu suatu sistem harus memenuhi dua syarat agar berada dalam kesetimbangan . Kondisi keseimbangan pertama menetapkan bahwa jumlah gaya pada setiap sumbu harus sama dengan nol.

Demikian pula, kondisi kesetimbangan kedua menyatakan bahwa jumlah momen setiap sumbu harus sama dengan nol agar sistem dianggap berada dalam kesetimbangan.

Jika kedua aturan kesetimbangan ini dipatuhi, berarti benda tidak mempunyai percepatan linier maupun sudut. Oleh karena itu, benda dalam keadaan diam, bergerak dengan kecepatan linier konstan, atau berputar dengan kecepatan sudut konstan.
Dalam fisika, ketika suatu benda berada dalam kesetimbangan mekanis, kita juga mengatakan bahwa benda tersebut berada dalam kesetimbangan translasi dan rotasi atau sekadar berada dalam kesetimbangan.
Ini adalah salah satu cara untuk menjelaskan apa itu keseimbangan mekanis, yang paling sederhana dari sudut pandang saya, namun di bawah ini kita akan melihat cara lain untuk mendefinisikan keseimbangan mekanis.
Contoh keseimbangan mekanik
Mengingat pengertian timbangan mekanik, di bawah ini Anda dapat melihat beberapa contoh timbangan mekanik untuk lebih memahami konsepnya.
- Contoh keseimbangan mekanis adalah lampu yang digantung di langit-langit. Lampu dalam keadaan diam karena gaya yang diberikan untuk menopangnya melawan gaya beratnya, oleh karena itu lampu berada dalam posisi kesetimbangan mekanis.
- Contoh lain dari timbangan mekanik adalah timbangan. Ketika lengan keseimbangan berhenti berputar berarti jumlah momen yang diterapkan padanya adalah nol, oleh karena itu lengan keseimbangan berada dalam kesetimbangan mekanis.
- Sebagai contoh terakhir dari kesetimbangan mekanik, kita dapat menggunakan mobil yang bergerak dengan kecepatan konstan. Jika mobil bergerak dengan kelajuan tetap, berarti percepatannya nol, sehingga jumlah gaya dan momennya juga nol. Oleh karena itu, ia berada dalam keseimbangan mekanis.
Jenis timbangan
Dalam keseimbangan mekanis, ada tiga jenis keseimbangan: keseimbangan stabil, keseimbangan tidak stabil, dan keseimbangan acuh tak acuh.
- Kesetimbangan stabil : Suatu benda berada dalam keseimbangan stabil ketika kembali ke posisi semula setelah dipindahkan. Misalnya pendulum.
- Keseimbangan tidak stabil : Suatu benda berada dalam kesetimbangan tidak stabil ketika ia tidak dapat menemukan posisi keseimbangan setelah didorong oleh suatu gaya. Misalnya pensil dipegang secara vertikal.
- Keseimbangan tak acuh (atau keseimbangan netral): suatu benda berada dalam keseimbangan acuh tak acuh jika, ketika kehilangan posisi keseimbangannya, ia menemukan posisi keseimbangan baru yang berbeda. Misalnya saja sebuah kelereng yang diletakkan di atas tanah.
Hubungan antara keseimbangan mekanik dan energi potensial
Seperti yang akan kita lihat di bawah, keseimbangan mekanik secara matematis berhubungan dengan energi potensial. Jadi pengertian keseimbangan mekanik juga dapat dijelaskan dengan energi potensial, walaupun sedikit lebih sulit untuk dipahami.
Suatu sistem berada dalam kesetimbangan mekanik pada suatu titik dimana turunan pertama energi potensial pada titik tersebut sama dengan nol.
Demikian pula, bergantung pada tanda turunan keduanya, kita dapat membedakan jenis kesetimbangannya:
- Kesetimbangan stabil : Suatu titik berada dalam kesetimbangan stabil jika turunan kedua energi potensial pada titik tersebut positif. Artinya, jika fungsi energi potensial mempunyai nilai minimum pada titik ini.
- Kesetimbangan tidak stabil : Suatu titik berada dalam kesetimbangan tidak stabil jika turunan kedua energi potensial pada titik tersebut negatif. Artinya, jika fungsi energi potensial mencapai maksimum pada titik ini.
- Kesetimbangan tak acuh : suatu titik berada dalam kesetimbangan acuh tak acuh jika turunan kedua energi potensial pada titik tersebut sama dengan nol.
Latihan keseimbangan mekanis terpecahkan
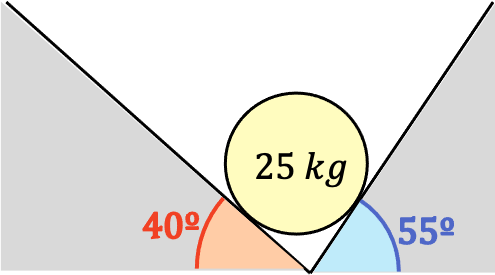
Hitunglah gaya yang harus dilakukan setiap bidang miring untuk menopang silinder berikutnya yang bermassa 25 kg dalam keadaan setimbang mekanik. Abaikan gesekan selama latihan.
Seperti dalam semua soal statika, untuk menyelesaikan suatu soal, Anda harus terlebih dahulu membuat diagram benda bebas sistem:
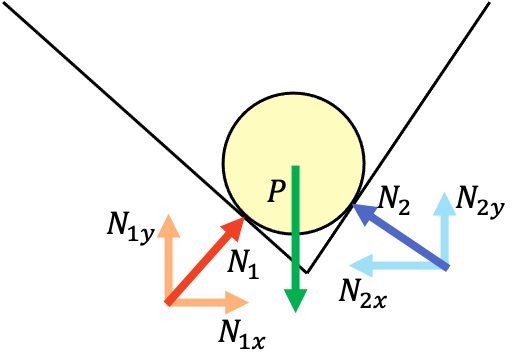
Perhatikan bahwa gaya-gaya yang ditunjukkan N 1x , N 1y dan N 2x , N 2y masing-masing merupakan komponen gaya-gaya N 1 dan N 2 .




Jadi, agar sistem berada dalam kesetimbangan mekanis, dua persamaan berikut harus dipenuhi:


Dari persamaan pertama kita dapat menyimpulkan bahwa gaya-gaya kedua bidang mempunyai hubungan sebagai berikut:




Sekarang mari kita ganti variabel pada persamaan kedua dengan ekspresi mereka:



Dan kita substitusikan hubungan yang terdapat pada persamaan pertama untuk mencari nilai gaya N 2 :




Dan terakhir, kita substitusikan nilai yang ditemukan pada hubungan antara gaya-gaya untuk menentukan No.1 :
