Artikel ini menjelaskan apa artinya benda berada dalam keseimbangan rotasi. Anda juga akan menemukan hubungan antara kesetimbangan rotasi dan kondisi kesetimbangan kedua. Demikian pula, Anda akan dapat melihat contoh keseimbangan rotasi dan, akhirnya, Anda akan dapat berlatih dengan latihan yang diselesaikan selangkah demi selangkah.
Apa itu keseimbangan rotasi?
Dalam fisika, kesetimbangan rotasi adalah keadaan di mana benda tidak berputar atau berputar tetap, yaitu benda diam atau berputar dengan kecepatan sudut tetap.
Kesetimbangan rotasi terjadi ketika jumlah momen (atau torsi) yang bekerja pada benda sama dengan nol.

Ketika suatu benda berada dalam kesetimbangan rotasi, berarti kecepatan sudutnya nol atau konstan. Oleh karena itu, percepatan sudut selalu nol pada keadaan ini.
Ingatlah bahwa dalam fisika, rotasi adalah suatu gerakan di mana suatu benda berubah orientasinya, sehingga suatu benda dapat berputar pada porosnya dengan tetap berada pada titik yang sama.
Kita dapat membedakan jenis-jenis keseimbangan rotasi:
- Kesetimbangan rotasi statis : ketika jumlah momen adalah nol dan kecepatan sudut benda adalah nol.
- Kesetimbangan rotasi dinamis : ketika jumlah momen sama dengan nol dan kecepatan sudut benda konstan (berbeda dari nol).
Kondisi keseimbangan kedua
Ketika suatu benda berada dalam kesetimbangan rotasi, kondisi kesetimbangan kedua dikatakan terpenuhi.
Jadi, kondisi kesetimbangan kedua dibuktikan ketika jumlah momen (atau pasangan) suatu sistem adalah nol. Perlu diingat bahwa modulus momen gaya-gaya tidak boleh dijumlahkan, melainkan dijumlahkan secara vektor, sehingga jumlah momen harus nol untuk setiap sumbu.
Dengan kata lain, untuk membuktikan bahwa suatu benda berada dalam kesetimbangan rotasi, momen setiap sumbu harus dijumlahkan secara terpisah, dan jika jumlah setiap sumbu adalah nol, maka benda tegar tersebut berada dalam kesetimbangan rotasi.

Keseimbangan rotasi dan translasi
Benda tegar berada dalam kesetimbangan rotasi dan translasi jika jumlah momen dan jumlah gaya sama dengan nol. Dengan kata lain, suatu benda berada dalam kesetimbangan translasi dan rotasi ketika resultan gaya dan momen resultan sama dengan nol.

Dalam keadaan ini, kecepatan linier benda akan menjadi nol atau konstan dan kecepatan sudutnya juga akan nol atau konstan, sehingga tidak mempunyai percepatan linier maupun percepatan sudut.
Perlu dicatat bahwa ketika suatu benda berada dalam keseimbangan gaya dan keseimbangan momen , maka benda tersebut dikatakan berada dalam keseimbangan .
Contoh Saldo Rotasi
Setelah Anda mengetahui pengertian keseimbangan rotasi, berikut adalah contoh penjelasan untuk menyelesaikan pemahaman konsep tersebut.
Contoh khas kesetimbangan rotasi adalah sistem keseimbangan. Ketika beban yang sama ditempatkan pada kedua sisi keseimbangan, lengan keseimbangan berhenti berputar dan, oleh karena itu, sistem berada dalam keseimbangan rotasi.
Latihan memecahkan keseimbangan rotasi
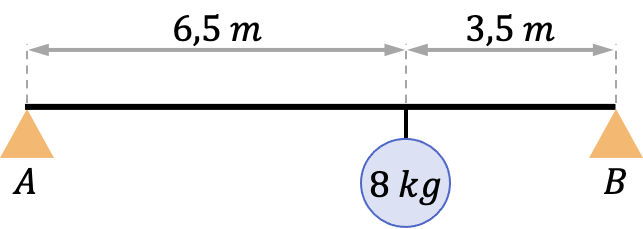
- Seperti terlihat pada gambar berikut, sebuah batang mendatar yang panjangnya 10 m menopang sebuah benda yang massanya 8 kg. Jika diketahui jarak antara tumpuan dan benda yang digantung, berapakah besar gaya yang dikerjakan oleh tumpuan jika sistem berada dalam keadaan seimbang rotasi dan translasi?
Pertama, kita menggunakan rumus gaya gravitasi untuk menghitung berat yang harus ditopang oleh batang horizontal:

Oleh karena itu, diagram benda bebas sistem adalah:
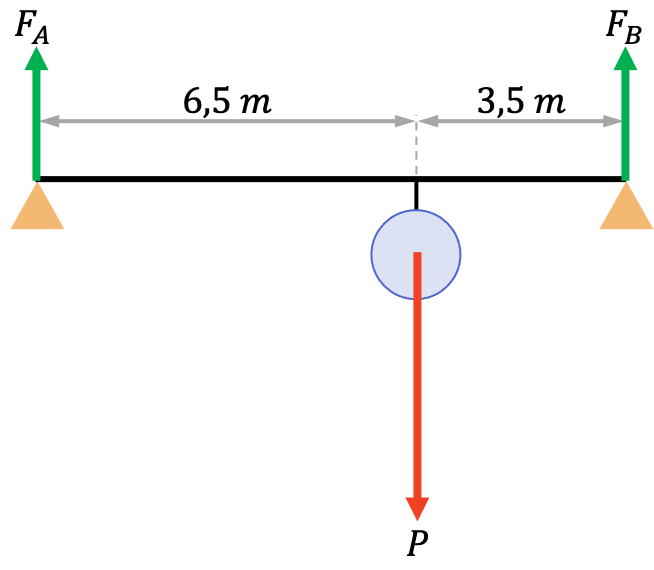
Rumusan masalah menyatakan bahwa sistem berada dalam keseimbangan gaya-gaya, sehingga jumlah semua gaya-gaya ini haruslah nol. Dengan menggunakan kondisi kesetimbangan ini, kita dapat merumuskan persamaan berikut:

Di sisi lain, pernyataan tersebut juga menyatakan bahwa sistem berada dalam kesetimbangan momentum. Jadi jika kita mempertimbangkan jumlah momen di titik mana pun dalam sistem, hasilnya pasti nol, dan jika kita mengambil titik acuan salah satu dari dua tumpuan, kita akan mendapatkan persamaan dengan satu hal yang tidak diketahui:


Sekarang kita dapat menghitung gaya yang diberikan oleh tumpuan B dengan menyelesaikan persamaan yang tidak diketahui:



Dan terakhir, kita dapat mengetahui intensitas gaya yang diterapkan pada tumpuan lain dengan mensubstitusikan nilai yang diperoleh ke dalam persamaan gaya vertikal:

