Artikel ini menjelaskan apa itu kondisi keseimbangan. Anda akan menemukan contoh nyata dari kondisi keseimbangan dan, sebagai tambahan, Anda akan dapat berlatih dengan latihan yang diselesaikan langkah demi langkah.
Bagaimana kondisi keseimbangannya?
Dalam fisika, kondisi kesetimbangan menyatakan bahwa suatu benda berada dalam kesetimbangan jika jumlah gaya dan jumlah momen yang diterapkan padanya sama dengan nol.
Jadi ada dua syarat kesetimbangan: syarat pertama menyatakan bahwa resultan gaya harus sama dengan nol, dan syarat kedua menyatakan bahwa momen resultan harus sama dengan nol.
Perlu diingat bahwa agar suatu sistem dianggap berada dalam kesetimbangan, kedua persamaan harus dipenuhi, tidak cukup hanya satu syarat yang dipenuhi.
Kondisi keseimbangan pertama
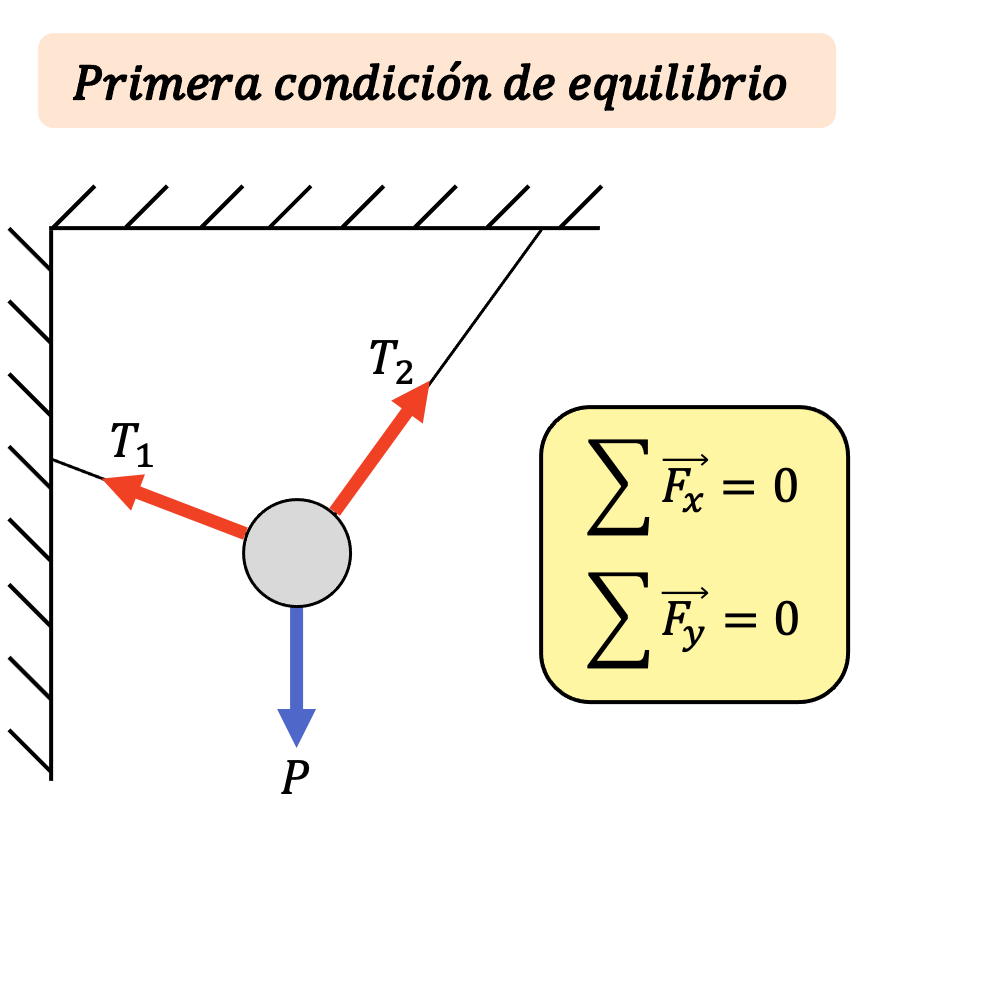
Kondisi kesetimbangan pertama menyatakan bahwa jumlah gaya yang diterapkan pada suatu benda harus sama dengan nol agar benda tersebut berada dalam kesetimbangan translasi.
Logikanya, jumlah gaya pada ketiga sumbu harus nol, jika tidak terpenuhi pada sumbu mana pun maka benda tidak seimbang.

Selanjutnya, jika jumlah gaya-gayanya nol, berarti benda tidak mempunyai percepatan linier. Jadi, benda dalam kesetimbangan translasi dapat diam (kecepatan nol) atau bergerak dengan kecepatan linier konstan.
Dari sini kita dapat membedakan dua jenis kesetimbangan translasi:
- Kesetimbangan translasi statis : ketika kondisi keseimbangan pertama terpenuhi dan benda juga dalam keadaan diam.
- Kesetimbangan translasi dinamis : ketika kondisi kesetimbangan pertama terpenuhi dan benda mempunyai kecepatan konstan (berbeda dari nol).
Kondisi keseimbangan kedua
Kondisi kesetimbangan kedua analog dengan kondisi kesetimbangan pertama namun menggunakan momen sebagai pengganti gaya.
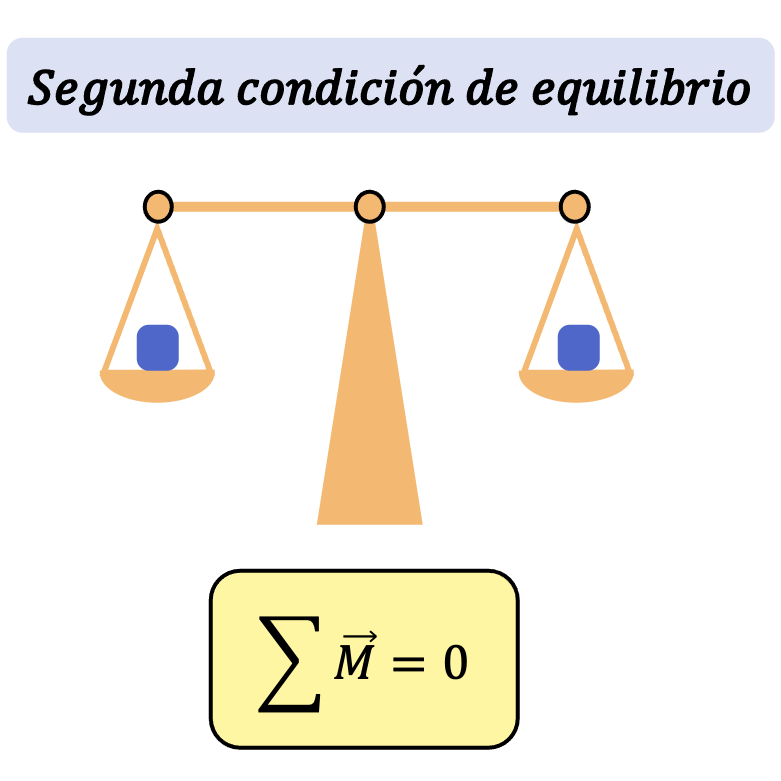
Syarat kesetimbangan kedua menyatakan bahwa jika jumlah momen suatu benda sama dengan nol, maka benda tersebut berada dalam kesetimbangan rotasi.
Demikian pula, jumlah momen harus sama dengan nol pada semua sumbu rangka, jika tidak maka kondisi kesetimbangan kedua tidak akan terpenuhi.

Ingatlah bahwa momen (atau torsi) suatu gaya pada suatu titik dihitung dengan mengalikan nilai gaya dengan jarak tegak lurus gaya ke titik tersebut.

Demikian pula agar syarat kesetimbangan kedua terpenuhi, percepatan sudut benda harus nol, artinya dalam keadaan ini benda tidak berputar atau berputar dengan kecepatan sudut konstan.
Contoh kondisi keseimbangan
Setelah melihat pengertian dari kedua kondisi keseimbangan tersebut, Anda akan dapat melihat beberapa contoh dari kehidupan sehari-hari di bawah ini untuk memahami konsep tersebut secara utuh.
Misalnya, ketika sebuah benda digantung di langit-langit, benda tersebut berada dalam keseimbangan karena sistem dalam keadaan diam sepenuhnya. Kita juga dapat mengatakan bahwa sistem berada dalam kesetimbangan statis.
Contoh lain dari kondisi keseimbangan dalam kehidupan sehari-hari adalah timbangan. Ketika lengan penyeimbang menjadi stabil dan berhenti berputar, sistem berada dalam keadaan diam dan oleh karena itu juga dalam keadaan seimbang.
Memecahkan masalah kondisi keseimbangan
Latihan 1
Diketahui sebuah benda tegar bermassa 12 kg yang digantung pada dua tali yang sudutnya ditunjukkan pada gambar berikut, hitunglah gaya yang harus dilakukan setiap tali agar benda tetap seimbang.
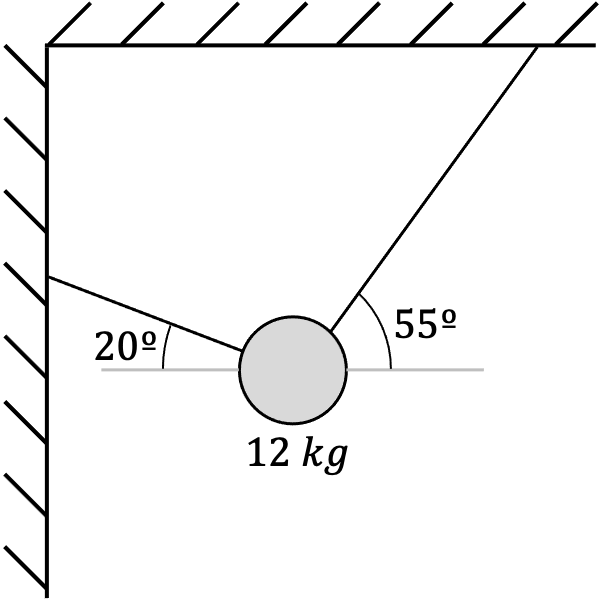
Hal pertama yang perlu kita lakukan untuk menyelesaikan masalah jenis ini adalah menggambar diagram benda bebas dari gambar tersebut:
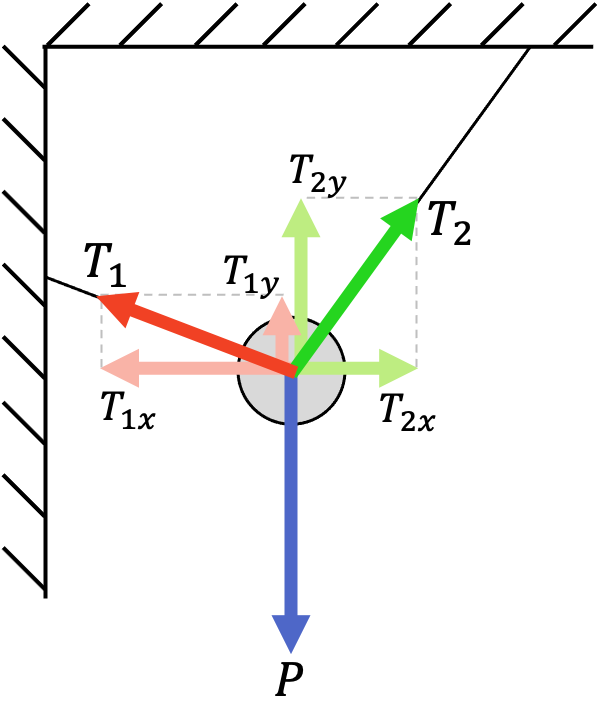
Perhatikan bahwa sebenarnya hanya ada tiga gaya yang bekerja pada benda yang digantung, yaitu gaya beban P dan tegangan tali T 1 dan T 2 . Gaya-gaya yang diwakili T 1x , T 1y , T 2x dan T 2y masing-masing merupakan komponen vektor dari T 1 dan T 2 .
Jadi, karena kita mengetahui sudut kemiringan tali, kita dapat menemukan ekspresi komponen vektor gaya tarik:




Di sisi lain, kita dapat menghitung gaya beban dengan menerapkan rumus gaya gravitasi:

Rumusan masalah menyatakan bahwa benda berada dalam keadaan setimbang, sehingga jumlah gaya vertikal dan jumlah gaya horizontal harus sama dengan nol. Jadi kita dapat menetapkan persamaan gaya dan menetapkannya sama dengan nol:


Kita sekarang mengganti komponen-komponen batasan dengan ekspresi yang ditemukan sebelumnya:


Dan terakhir, kita selesaikan sistem persamaan untuk mendapatkan nilai gaya T 1 dan T 2 :
![\left.\begin{array}{l}-T_1\cdot 0,94+T_2\cdot 0,57=0\\[2ex]T_1\cdot 0,34+T_2\cdot 0,82-117 .72=0\end{array }\right\} \longrightarrow \ \begin{array}{c}T_1=69,56 \ N\\[2ex]T_2=114,74 \ N\end{array}[/ latex]
<div class="wp-block-otfm-box-spoiler-end otfm-sp_end"></div>
<h3 class="wp-block-heading"> Exercice 2</h3>
<p> Calculer le moment que doit faire le support de la poutre suivante pour qu’elle soit en équilibre de rotation : </p>
<div class="wp-block-image">
<figure class="aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png" alt="Exercice résolu de la deuxième condition d'équilibre" class="wp-image-397" width="237" height="203" srcset="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre-300x257.png 300w, https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png 643w" sizes="(max-width: 300px) 100vw, 300px"></figure>
</div>
<div class="wp-block-otfm-box-spoiler-start otfm-sp__wrapper otfm-sp__box js-otfm-sp-box__closed otfm-sp__FFF8E1" role="button" tabindex="0" aria-expanded="false" data-otfm-spc="#FFF8E1" style="text-align:center">
<div class="otfm-sp__title"> <strong>Voir la solution</strong></div>
</div>
<p> Pour que la poutre soit en équilibre de rotation et que la deuxième condition d’équilibre soit donc remplie, le support doit contrecarrer le moment de torsion généré par la force, donc la somme des moments sera nulle. On calcule donc le moment (ou couple) généré par la force au niveau de l’appui : [latex]M_{force}=13\cdot 9 = 117 \ Nm” title=”Rendered by QuickLaTeX.com” height=”343″ width=”3353″ style=”vertical-align: 0px;”></p>
</p>
<p class=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-694655a52049a536489cebbaef3bc7a2_l3.png) Dan sekarang kita nyatakan persamaan keseimbangan momen:
Dan sekarang kita nyatakan persamaan keseimbangan momen:

Momen yang menghasilkan gaya lewat di dalam layar, sehingga tandanya negatif:

Dan akhirnya, kita menyelesaikan hal yang tidak diketahui dalam persamaan:

Momen yang diperoleh bertanda positif, sehingga maknanya berada di luar layar.
Latihan 3
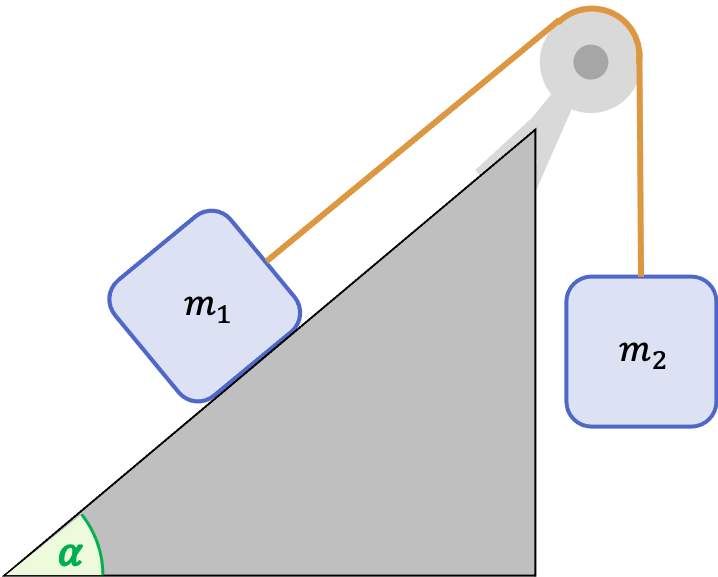
Seperti terlihat pada gambar berikut, dua buah benda dihubungkan dengan tali dan katrol yang massanya dapat diabaikan. Jika benda 2 bermassa 7 kg dan kemiringan lerengnya 50º, hitunglah massa benda 1 sehingga seluruh sistem berada dalam kondisi setimbang. Dalam hal ini, gaya gesek dapat diabaikan.
Benda 1 berada pada bidang miring, jadi hal pertama yang harus dilakukan adalah memvektorisasikan gaya beratnya agar mempunyai gaya-gaya pada sumbu lereng:


Oleh karena itu, himpunan gaya yang bekerja pada keseluruhan sistem adalah:
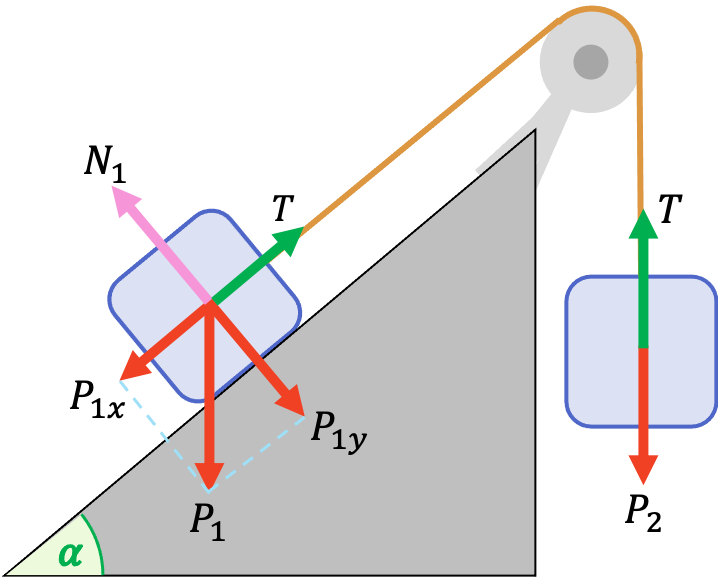
Rumusan masalah menyatakan bahwa sistem gaya-gaya berada dalam keadaan setimbang, sehingga kedua benda harus berada dalam keadaan setimbang. Dari informasi tersebut kita dapat merumuskan persamaan kesetimbangan kedua benda:
![1\ \rightarrow \ \begin{cases}P_{1x}=T\\[2ex]P_{1y}=N\end{cases} \qquad\qquad 2 \ \rightarrow \ T=P_2[/latex ] Ainsi, la composante du poids de l'objet 1 incliné dans le sens de la pente doit être égale au poids de l'objet 2 : [latex]P_{1x}=P_2](https://physigeek.com/wp-content/ql-cache/quicklatex.com-ed082b4f064316ab20fb0d26054d3010_l3.png "Rendered by QuickLaTeX.com")

Sekarang kita terapkan rumus gaya gravitasi dan sederhanakan persamaannya:


Terakhir, kita substitusikan datanya dan selesaikan massa benda 1:



Latihan 4
Seperti terlihat pada gambar berikut, sebuah batang mendatar yang panjangnya 10 m menopang sebuah benda yang massanya 8 kg. Jika diketahui jarak antara tumpuan dan benda yang digantung, berapakah besar gaya yang dikerjakan oleh tumpuan jika sistem berada dalam keadaan seimbang rotasi dan translasi?
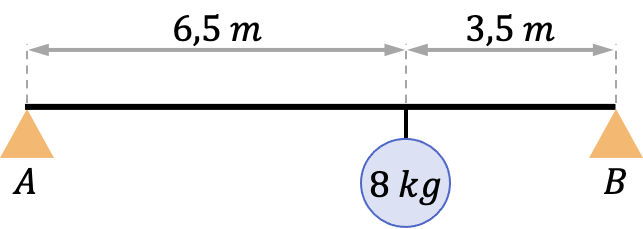
Pertama, kita menggunakan rumus gaya gravitasi untuk menghitung berat yang harus ditopang oleh batang horizontal:

Oleh karena itu, diagram benda bebas sistem adalah:
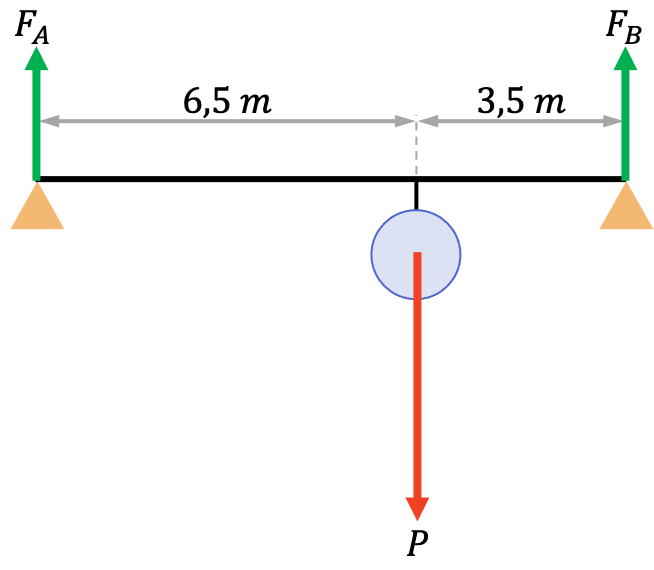
Rumusan masalah menyatakan bahwa sistem berada dalam keseimbangan gaya-gaya, sehingga jumlah semua gaya-gaya ini haruslah nol. Dengan menggunakan kondisi kesetimbangan ini, kita dapat merumuskan persamaan berikut:

Di sisi lain, pernyataan tersebut juga menyatakan bahwa sistem berada dalam kesetimbangan momentum. Jadi jika kita mempertimbangkan jumlah momen di titik mana pun dalam sistem, hasilnya pasti nol, dan jika kita mengambil titik acuan salah satu dari dua tumpuan, kita akan mendapatkan persamaan dengan satu hal yang tidak diketahui:


Sekarang kita dapat menghitung gaya yang diberikan oleh tumpuan B dengan menyelesaikan persamaan yang tidak diketahui:



Dan terakhir, kita dapat mengetahui intensitas gaya yang diterapkan pada tumpuan lain dengan mensubstitusikan nilai yang diperoleh ke dalam persamaan gaya vertikal:

