Dieser Artikel erklärt, was Winkelbeschleunigung in der Physik ist. So erfahren Sie, wie Sie die Winkelbeschleunigung berechnen, eine gelöste Aufgabe und den Zusammenhang zwischen Winkelbeschleunigung und Tangentialbeschleunigung.
Was ist Winkelbeschleunigung?
Die Winkelbeschleunigung ist ein Maß, das die Rotationsbeschleunigung eines Körpers definiert. Daher gibt die Winkelbeschleunigung die Änderung der Winkelgeschwindigkeit eines Körpers an. Mit anderen Worten: Die Winkelbeschleunigung stellt die Rate dar, mit der sich die Winkelgeschwindigkeit ändert.
Die Einheit der Winkelbeschleunigung im Internationalen System (SI) ist das Bogenmaß pro Quadratsekunde (rad/s 2 ). Ebenso wird die Winkelbeschleunigung auch in Einheiten von s -2 ausgedrückt, da das Bogenmaß eigentlich dimensionslos ist.
Die Winkelbeschleunigung wird üblicherweise durch das Symbol für den griechischen Buchstaben α (Alpha) dargestellt.
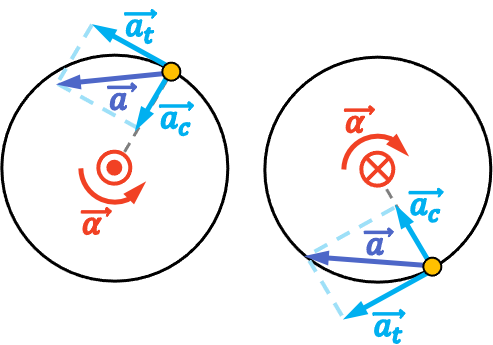
Die Winkelbeschleunigung wird durch einen axialen Vektor parallel zur Rotationsachse dargestellt. Die Norm des Vektors ist der Wert der Winkelbeschleunigung und die Richtung des Vektors wird durch die Rechte-Hand-Regel bestimmt. Wenn sich das Objekt in der Ebene im Uhrzeigersinn dreht, bewegt sich der Winkelbeschleunigungsvektor innerhalb der Ebene. Wenn sich das Objekt dagegen gegen den Uhrzeigersinn dreht, bewegt sich der Winkelbeschleunigungsvektor außerhalb der Ebene.
Winkelbeschleunigungsformel
Die durchschnittliche Winkelbeschleunigung ist gleich der Zunahme der Winkelgeschwindigkeit (Δω) dividiert durch die Zunahme der Zeit (Δt). Um die Winkelbeschleunigung zu berechnen, muss daher die Differenz zwischen der End- und der Anfangswinkelgeschwindigkeit durch die Differenz zwischen dem End- und dem Anfangszeitpunkt geteilt werden (α = Δω/Δt).
Daher lautet die Formel zur Berechnung der durchschnittlichen Beschleunigung :
Gold:
-

ist die Winkelbeschleunigung.
-

ist die Änderung der Winkelgeschwindigkeit.
-

ist die zeitliche Variation.
-

ist die Endwinkelgeschwindigkeit.
-

ist die anfängliche Winkelgeschwindigkeit.
-

ist der letzte Moment.
-

ist der Anfangsmoment.
Beachten Sie, dass diese Formel nur dann erfüllt ist, wenn das Mobile eine gleichmäßig beschleunigte Kreisbewegung beschreibt, das heißt, wenn die Winkelbeschleunigung über den gesamten Weg konstant ist. Andernfalls verwenden Sie die folgende Formel, um die momentane Winkelbeschleunigung zu ermitteln:

Nach der Berechnung des Wertes der Winkelbeschleunigung muss das Ergebnis entsprechend dem Vorzeichen der Winkelbeschleunigung interpretiert werden:
- α>0 : Wenn die Winkelbeschleunigung positiv ist, bedeutet dies, dass der Wert der Winkelgeschwindigkeit mit der Zeit zunimmt. Es handelt sich also um eine gleichmäßig beschleunigte Kreisbewegung.
- α<0 : Ist die Winkelbeschleunigung negativ, bedeutet dies, dass der Wert der Winkelgeschwindigkeit mit der Zeit abnimmt. Es handelt sich also um eine gleichmäßig verzögerte Kreisbewegung.
- α=0 : Wenn die Winkelbeschleunigung gleich Null ist, bedeutet dies, dass der Wert der Winkelgeschwindigkeit konstant ist. Es handelt sich also um eine gleichmäßige Kreisbewegung.
Beispiel für die Berechnung der Winkelbeschleunigung
Nachdem wir die Definition der Winkelbeschleunigung und ihre Formel kennengelernt haben, sehen wir uns in diesem Abschnitt ein konkretes Beispiel für die Berechnung der Winkelbeschleunigung an.
- Ein sich kreisförmig bewegender Körper rotiert mit einer Winkelgeschwindigkeit von 80 U/min. Wenn er nach 6 Sekunden vollständig aufhört zu rotieren, wie hoch ist dann die durchschnittliche Winkelbeschleunigung des Körpers in diesem Zeitraum?
Zuerst konvertieren wir die Winkelgeschwindigkeit in Bogenmaß pro Sekunde, um mit den Einheiten von Système International arbeiten zu können. Eine Umdrehung entspricht 2π Bogenmaß, also:

Wir wenden nun die Winkelbeschleunigungsformel an:

Wenn der Körper schließlich zum Stillstand kommt, ist die endgültige Winkelgeschwindigkeit Null. Darüber hinaus kennen wir den Wert des Endzeitpunkts oder des Anfangszeitpunkts nicht, wissen aber, dass die Differenz zwischen beiden 6 s beträgt. Die Winkelbeschleunigung beträgt daher:

Beachten Sie, dass in diesem Fall die Winkelbeschleunigung negativ ist, was bedeutet, dass sich der Körper mit zunehmend langsamerer Winkelgeschwindigkeit dreht, bis er vollständig zum Stillstand kommt.
Winkelbeschleunigung und Tangentialbeschleunigung
Winkelbeschleunigung und Tangentialbeschleunigung hängen mathematisch zusammen, sodass die Tangentialbeschleunigung aus der Winkelbeschleunigung berechnet werden kann (oder umgekehrt).
Die Tangentialbeschleunigung (oder Linearbeschleunigung) wird durch Multiplikation der Winkelbeschleunigung mit dem Radius der kreisförmigen Bewegungsbahn berechnet. Daher hängen Winkelbeschleunigung und Tangentialbeschleunigung durch den Radius der kreisförmigen Bewegungsbahn zusammen.

Gold:
-

ist die Tangentialbeschleunigung.
-
ist die Winkelbeschleunigung.
-

ist der Radius der Bahn der Kreisbewegung.