In diesem Artikel wird erklärt, was es für einen Körper bedeutet, sich im Rotationsgleichgewicht zu befinden. Außerdem finden Sie den Zusammenhang zwischen Rotationsgleichgewicht und der zweiten Gleichgewichtsbedingung. Ebenso können Sie sich ein Beispiel für das Rotationsgleichgewicht ansehen und schließlich mit einer Schritt für Schritt gelösten Übung üben.
Was ist Rotationsgleichgewicht?
In der Physik ist das Rotationsgleichgewicht ein Zustand, in dem der Körper keine Rotation oder eine konstante Rotation aufweist, d. h. der Körper ruht oder sich mit konstanter Winkelgeschwindigkeit dreht.
Rotationsgleichgewicht liegt vor, wenn die Summe der auf den Körper wirkenden Momente (oder Drehmomente) gleich Null ist.

Wenn sich ein Körper im Rotationsgleichgewicht befindet, bedeutet das, dass seine Winkelgeschwindigkeit Null oder konstant ist. Daher ist die Winkelbeschleunigung in diesem Zustand immer Null.
Denken Sie daran, dass Rotation in der Physik eine Bewegung ist, bei der der Körper seine Ausrichtung ändert, sodass sich ein Objekt um seine Achse drehen kann, während es am selben Punkt bleibt.
Wir können Arten des Rotationsgleichgewichts unterscheiden:
- Statisches Rotationsgleichgewicht : wenn die Summe der Momente Null ist und die Winkelgeschwindigkeit des Körpers Null ist.
- Dynamisches Rotationsgleichgewicht : wenn die Summe der Momente Null ist und die Winkelgeschwindigkeit des Körpers konstant (von Null verschieden) ist.
Zweite Gleichgewichtsbedingung
Befindet sich ein Körper im Rotationsgleichgewicht, gilt die zweite Gleichgewichtsbedingung als erfüllt.
Somit ist die zweite Gleichgewichtsbedingung verifiziert, wenn die Summe der Momente (oder Paare) eines Systems Null ist. Beachten Sie, dass nicht die Moduli der Momente der Kräfte addiert werden sollten, sondern dass die Momente vektoriell addiert werden sollten, sodass die Summe der Momente für jede Achse Null sein sollte.
Mit anderen Worten: Um zu überprüfen, ob sich ein Körper im Rotationsgleichgewicht befindet, müssen die Momente jeder Achse separat addiert werden. Wenn die Summe jeder Achse Null ist, befindet sich der starre Körper im Rotationsgleichgewicht.

Rotations- und Translationsgleichgewicht
Ein starrer Körper befindet sich im Rotations- und Translationsgleichgewicht, wenn die Summe der Momente und die Summe der Kräfte gleich Null sind. Mit anderen Worten: Ein Körper befindet sich im Translations- und Rotationsgleichgewicht, wenn die resultierende Kraft und das resultierende Moment Null sind.

In dieser Situation ist die lineare Geschwindigkeit des Körpers null oder konstant und seine Winkelgeschwindigkeit ist ebenfalls null oder konstant, sodass er weder eine lineare Beschleunigung noch eine Winkelbeschleunigung aufweist.
Es ist zu beachten, dass man sagt, dass sich ein Körper im Gleichgewicht befindet, wenn sich ein Körper sowohl im Gleichgewicht der Kräfte als auch im Gleichgewicht der Momente befindet .
Beispiel für ein Rotationsgleichgewicht
Nachdem Sie nun die Definition des Rotationsgleichgewichts kennen, wird hier ein Beispiel erläutert, um das Verständnis des Konzepts zu vervollständigen.
Ein typisches Beispiel für ein Rotationsgleichgewicht ist ein Gleichgewichtssystem. Wenn auf beiden Seiten einer Waage genau das gleiche Gewicht lastet, hört der Waagearm auf, sich zu drehen, und das System befindet sich somit im Rotationsgleichgewicht.
Übung gelöstes Rotationsgleichgewicht
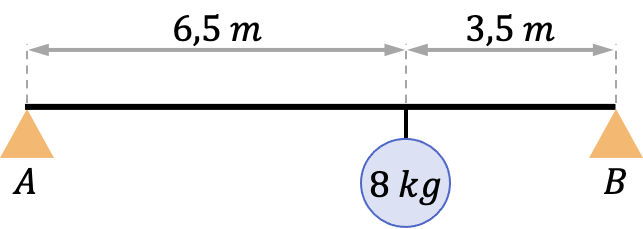
- Wie Sie in der folgenden Abbildung sehen können, trägt eine 10 m lange Reckstange einen Körper mit einer Masse von 8 kg. Welchen Wert haben die von den Stützen ausgeübten Kräfte, wenn das System im Gleichgewicht von Rotation und Translation ist, wenn man die Abstände zwischen den Stützen und dem aufgehängten Körper kennt?
Zunächst verwenden wir die Gravitationskraftformel, um das Gewicht zu berechnen, das der horizontale Balken tragen muss:

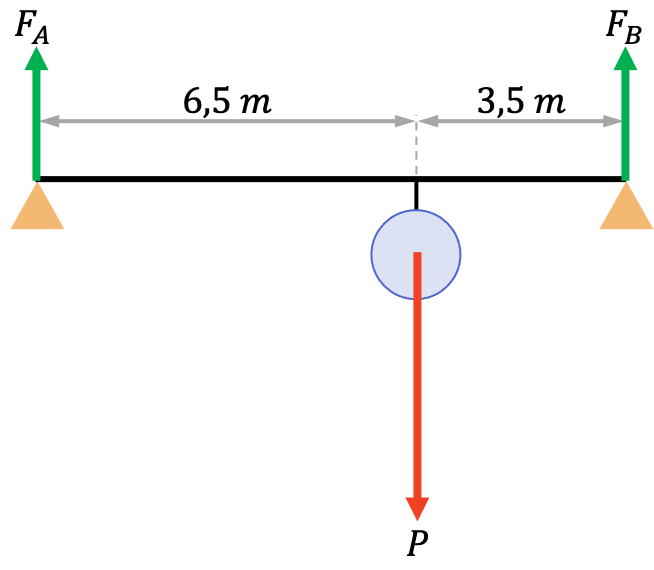
Das Freikörperdiagramm des Systems lautet daher:
Die Problemstellung sagt uns, dass sich das System im Gleichgewicht der Kräfte befindet, sodass die Summe aller dieser Kräfte Null sein muss. Unter Verwendung dieser Gleichgewichtsbedingung können wir die folgende Gleichung formulieren:

Andererseits sagt uns die Aussage auch, dass sich das System im Impulsgleichgewicht befindet. Wenn wir also die Summe der Momente an einem beliebigen Punkt im System betrachten, muss das Ergebnis Null sein, und wenn wir den Referenzpunkt eines der beiden Träger nehmen, erhalten wir eine Gleichung mit einer einzigen Unbekannten:


Wir können nun die von der Stütze B ausgeübte Kraft berechnen, indem wir die Unbekannte in der Gleichung lösen:



Und schließlich können wir die Intensität der auf die andere Stütze ausgeübten Kraft ermitteln, indem wir den erhaltenen Wert in die Gleichung der vertikalen Kräfte einsetzen:

