In diesem Artikel wird erläutert, was die Mechanismen sind und wofür sie verwendet werden. Sie finden daher die Bedeutung von Mechanismen, Beispiele für Mechanismen und die verschiedenen Arten von Mechanismen.
Was ist ein Mechanismus?
Ein Mechanismus ist eine Reihe mechanischer Elemente, die es Menschen ermöglichen, Arbeiten mit weniger Kraftaufwand und bequemer auszuführen.
Genauer gesagt handelt es sich bei Mechanismen um Vorrichtungen, die dank eines Übertragungssystems eine Kraft oder Bewegung umwandeln.
Die Funktion eines Mechanismus besteht also darin, die Arbeit des Menschen zu erleichtern, da mit Mechanismen Kräfte oder Bewegungen erzeugt werden, die ohne sie nur sehr schwer oder sogar unmöglich wären.

Beispielsweise ermöglicht das Mechanismussystem eines Autos, dass es sich vorwärts bewegt, indem man auf das Gaspedal drückt und den Schalthebel bewegt. Somit wandelt der Fahrzeugmechanismus die vom Menschen geleistete Arbeit in Vorwärtsbewegung um.
Kurz gesagt ist ein Mechanismus eine Reihe von Teilen einer Maschine, die eine Eingangskraft oder -bewegung in eine gewünschte Ausgangskraft oder -bewegung umwandelt.
Beispiele für Mechanismen
Sobald wir die Definition des Mechanismus gesehen haben, werden wir mehrere Beispiele für Mechanismen sehen, um das Konzept besser zu verstehen.
- Pleuel-Kurbel-Mechanismus : Mechanismus zur Umwandlung einer linearen Bewegung in eine kreisförmige Bewegung und umgekehrt.
- Nockenfolgemechanismus : Ein nicht umkehrbarer Mechanismus, der eine Drehbewegung in eine oszillierende lineare Bewegung umwandelt.
- Schneckenmechanismus : Mechanismus zur Übertragung einer Drehbewegung zwischen zwei senkrechten Achsen.
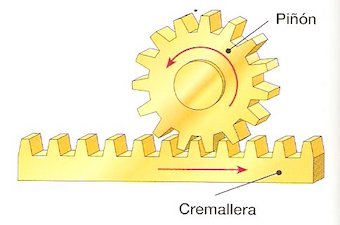
- Zahnstangenmechanismus : Umkehrmechanismus, der den Wechsel von Kreisbewegung zu linearer Bewegung ermöglicht.
- Reibräder : Mechanismus, der durch Reibung eine Drehbewegung überträgt.
- Hebezeug : Mechanismus, der aus einer Reihe von Riemenscheiben besteht und die bequeme Handhabung schwerer Gegenstände ermöglicht.
- Kettenräder : Ein Mechanismus zur Übertragung von Winkelgeschwindigkeit und Kraft zwischen zwei Achsen.
Arten von Mechanismen
Linearer Übertragungsmechanismus
Lineare Übertragungsmechanismen sind Mechanismen, die eine lineare Bewegung ausüben und als Reaktion darauf eine weitere lineare Bewegung erzeugen. Diese Art von Mechanismus überträgt also eine geradlinige Bewegung.
Der Hebel ist beispielsweise ein linearer Übertragungsmechanismus, da seine Funktion darin besteht, eines seiner Enden nach unten zu bewegen (lineare Bewegung) und sich daher der andere Arm des Hebels mit der Last nach oben bewegt (lineare Bewegung). Es handelt sich also um einen Mechanismus, der eine lineare Bewegung überträgt.
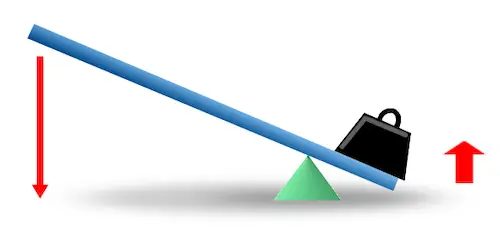
Im Allgemeinen ermöglicht diese Art von Mechanismus die Änderung der Eingangskraft, sodass eine Kraft ausgeübt werden kann, die viel größer ist als die ausgeübte Kraft. Dem vorherigen Beispiel folgend, können Sie mit einer Waage einen schweren Gegenstand mit weniger Kraft heben, als wenn Sie das Gewicht ohne ein mechanisches Instrument heben müssten.
Kreisförmiger Übertragungsmechanismus
Kreisgetriebe sind Mechanismen, die am Eingang eine Kreisbewegung und am Ausgang ebenfalls eine Kreisbewegung haben. Diese Art von Mechanismus überträgt also eine Drehbewegung.
Der Unterschied zwischen einem kreisförmigen Antriebsmechanismus und einem linearen Antriebsmechanismus besteht also einfach in der Art der Bewegung, die sie übertragen. Ein kreisförmiger Übertragungsmechanismus überträgt Drehbewegungen, während ein linearer Übertragungsmechanismus geradlinige Bewegungen überträgt.
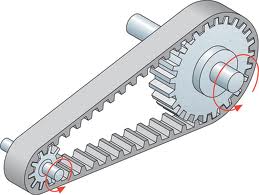
Beispielsweise handelt es sich bei einem durch einen Riemen verbundenen Riemenscheibensystem um einen kreisförmigen Übertragungsmechanismus, da die Drehbewegung der Eingangsriemenscheibe auf die Ausgangsriemenscheibe übertragen wird.

Diese Art von Mechanismus hat die Funktion, die Winkelgeschwindigkeit zu verändern, sodass bei der Übertragung einer Kreisbewegung die Rotationsgeschwindigkeit entsprechend erhöht oder verringert wird.
Dazu spielen wir mit dem Durchmesser des Eingangsrades und dem Durchmesser des Ausgangsrades: Ist der Eingangsdurchmesser größer als der Ausgangsdurchmesser, erhöht sich die Winkelgeschwindigkeit, ist der Eingangsdurchmesser hingegen kleiner größer als der Austrittsdurchmesser ist, verringert sich die Winkelgeschwindigkeit.
Kettenräder mit Kette, sogenannte Kettenradgetriebe, sind ebenfalls kreisförmige Übertragungsmechanismen. Der Vorteil von Ketten besteht darin, dass sie effizienter sind, jedoch weniger flexibel als Riemen.
Schließlich sind Zahnräder auch kreisförmige Übertragungsmechanismen, da es sich um Zahnräder handelt, deren Zähne ineinander passen und daher die kreisförmige Bewegung von einem Rad auf das andere übertragen wird.
Es gibt hauptsächlich drei Arten von Zahnrädern: gerade Zahnräder mit parallelen Achsen, Kegelräder mit senkrechten Achsen und schrägverzahnte Zahnräder mit schrägverzahnten Zähnen.
Stirnräder

Kegelräder

Schrägverzahnungen

Bewegungstransformationsmechanismus
Bewegungstransformationsmechanismen wandeln die Eingabebewegung in eine andere Bewegungsart um, sodass die Eingabebewegung und die Ausgabebewegung unterschiedlich sind.
Grundsätzlich wandeln diese Arten von Mechanismen Kreisbewegungen in lineare Bewegungen um, oder umgekehrt, sie wandeln Kreisbewegungen in lineare Bewegungen um.
Beispielsweise wird der Nockenfolgermechanismus verwendet, um eine kreisförmige Bewegung in eine hin- und hergehende lineare Bewegung umzuwandeln. Diese Art von Mechanismus ist irreversibel, was bedeutet, dass Sie von einer Kreisbewegung in eine lineare Bewegung übergehen können, nicht jedoch umgekehrt.
In ähnlicher Weise wird der Zahnstangenmechanismus verwendet, um eine Vorwärtsbewegung in eine Drehbewegung umzuwandeln. Diese Art von Mechanismus ist reversibel, sodass Sie auch eine kreisförmige Bewegung in eine lineare Bewegung umwandeln können.
Mechanischer Vorteil eines Mechanismus
Der mechanische Vorteil eines Mechanismus ist das Verhältnis der Ausgangskraft zur Eingangskraft des Mechanismus. Daher ist der mechanische Vorteil gleich dem Verhältnis der Ausgangskraft zur Eingangskraft.
Die Formel zur Berechnung des mechanischen Vorteils eines Mechanismus lautet also wie folgt:

Der mechanische Vorteil eines Mechanismus kann auch berechnet werden, indem die Geschwindigkeit der ausgeübten Kraft durch die Geschwindigkeit geteilt wird, mit der sich die Last bewegt. Ebenso entspricht dieser Ausdruck der Verschiebung des Punktes der ausgeübten Kraft dividiert durch die Verschiebung der Last:

Gold:
-

ist der mechanische Vorteil.
-

ist die Ausgangskraft.
-

ist die Eingangskraft.
-

ist die Eingangsgeschwindigkeit.
-

ist die Austrittsgeschwindigkeit.
-

ist die vom Eintrag zurückgelegte Strecke.
-

ist die vom Ausgang zurückgelegte Strecke.
Wenn wir hingegen ein Moment anstelle einer Kraft übertragen wollen, wird der mechanische Vorteil berechnet, indem das Ausgangsmoment durch das Eingangsmoment dividiert wird. Beispielsweise wird die mechanische Übersetzung von Radgetrieben anhand des Verhältnisses des übertragenen Moments gemessen.

Gold:
-
ist der mechanische Vorteil.
-

ist die Release-Zeit.
-

ist die Eintrittszeit.
-

ist die Eingangswinkelgeschwindigkeit.
-

ist die Austrittswinkelgeschwindigkeit.
Aus der Formel für den mechanischen Vorteil können dann die folgenden Beziehungen abgeleitet werden:
- VM>1 : Die Ausgangskraft ist größer als die ausgeübte Kraft, sodass der Mechanismus die Größe der Kraft erhöht. Andererseits ist der von der Last zurückgelegte Weg kleiner als der Weg, den der Kraftangriffspunkt zurücklegt.
- VM<1 : Die Ausgangskraft ist geringer als die ausgeübte Kraft, daher reduziert der Mechanismus den Kraftwert. Wir erhalten jedoch eine Verschiebung der Last, die größer ist als die Verschiebung am Kraftangriffspunkt.
- VM=1 : Die Ausgangskraft des Mechanismus ist gleich der auf ihn ausgeübten Kraft. Auch die Verschiebungen der Last und der Angriffspunkt der Kraft sind identisch. Obwohl diese Art von Mechanismen keinen mechanischen Vorteil bieten, werden sie häufig verwendet, um die Kraft bequemer auszuüben. Beispielsweise ermöglicht eine einfache Riemenscheibe die Abwärtskraft, um ein Gewicht anzuheben, wodurch das Heben der Last erleichtert wird.
Freiheitsgrade eines Mechanismus
Die Freiheitsgrade eines Mechanismus sind die Anzahl der verallgemeinerten Geschwindigkeiten, die erforderlich sind, um den kinematischen Zustand eines Mechanismus vollständig zu definieren.
Somit wird die Anzahl der Freiheitsgrade eines Mechanismus nach folgender Formel berechnet:

Gold:
-

ist die Anzahl der Freiheitsgrade des Mechanismus.
-

ist die Anzahl der Körper oder Elemente, aus denen der Mechanismus besteht.
-

ist die Anzahl der Freiheitsgrade jedes Festkörpers. Wenn wir den Mechanismus in zwei Dimensionen untersuchen, hat jeder Körper drei Freiheitsgrade, wenn wir jedoch in drei Dimensionen arbeiten, hat jeder Körper sechs Freiheitsgrade.
-

ist die Anzahl der durch Link k auferlegten Einschränkungen.
Es ist zu beachten, dass die Freiheitsgrade eines Mechanismus ein wichtiger Parameter zur Definition seiner Bewegung sind, da sie mit der Anzahl der Gleichungen übereinstimmen, die zur Beschreibung seiner Bewegung erforderlich sind.