In diesem Artikel wird erklärt, was der dynamische Reibungskoeffizient (oder dynamische Reibungskoeffizient) in der Physik ist und wie er berechnet wird. Darüber hinaus finden Sie ein konkretes Beispiel zur Berechnung des dynamischen Reibungskoeffizienten, um das Konzept besser zu verstehen.
Was ist der dynamische Reibungskoeffizient?
Der dynamische Reibungskoeffizient oder dynamische Reibungskoeffizient ist ein Koeffizient, der die Reibung zwischen den Oberflächen zweier Körper angibt, wenn einer über den anderen gleitet.
Der dynamische Reibungskoeffizient ist ein dimensionsloser Koeffizient, das heißt, er hat keine Einheit.
Darüber hinaus wird der dynamische Reibungskoeffizient im Allgemeinen durch das Symbol μd dargestellt.
So berechnen Sie den dynamischen Reibungskoeffizienten
Der dynamische Reibungskoeffizient ist gleich dem Verhältnis zwischen der dynamischen Reibungskraft (oder Reibungskraft) und der Normalkraft. Daher wird der dynamische Reibungskoeffizient berechnet, indem die dynamische Reibungskraft durch die Normalkraft dividiert wird.
Kurz gesagt lautet die Formel für den dynamischen Reibungskoeffizienten :

Gold:
-

ist der dynamische Reibungskoeffizient, der einheitenlos ist.
-

ist die Reibungskraft oder dynamische Reibung, ausgedrückt in Newton.
-

ist die Normalkraft, ausgedrückt in Newton.
Übung zum dynamischen Reibungskoeffizienten gelöst
Nachdem wir nun die Definition des dynamischen Reibungskoeffizienten und seine Formel kennen, finden Sie unten eine gelöste Übung zu diesem Thema.
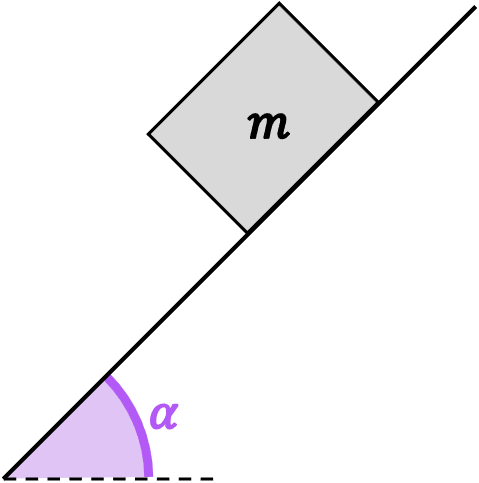
- Wir platzieren einen Körper mit der Masse m=6 kg auf der Spitze einer um 45° geneigten Ebene. Wenn der Körper mit einer Beschleunigung von 4 m/s 2 auf der schiefen Ebene gleitet, wie groß ist dann der dynamische Reibungskoeffizient zwischen der Oberfläche der schiefen Ebene und der des Körpers? Daten: g=10 m/s 2 .
Das erste, was wir tun müssen, um ein physikalisches Problem in Bezug auf die Dynamik zu lösen, ist das Zeichnen des Freikörperdiagramms. Alle im System wirkenden Kräfte sind also:
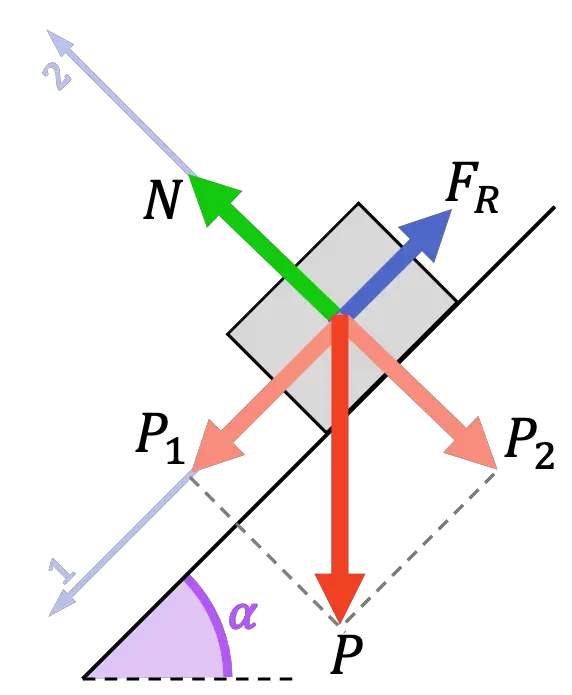
In Richtung der Achse 1 (parallel zur schiefen Ebene) erfährt der Körper eine Beschleunigung, in Richtung der Achse 2 (senkrecht zur schiefen Ebene) befindet sich der Körper jedoch in Ruhe. Aus diesen Informationen schlagen wir die Gleichungen der Kräfte des Systems vor:


Wir können also die Normalkraft aus der zweiten Gleichung berechnen:
![\begin{array}{l}N=P_2\\[3ex]N=m\cdot g\cdot \text{cos}(\alpha) \\[3ex] N=6 \cdot 10 \cdot \ text{cos}(45º)\\[3ex]N=42,43 \ N\end{array}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-59341555fe3d5fe315ceb1864547873b_l3.png "Rendered by QuickLaTeX.com")
Andererseits berechnen wir den Wert der Reibungskraft (oder Reibungskraft) aus der ersten dargestellten Gleichung:
![\begin{array}{l}P_1-F_R=m\cdot a\\[3ex]F_R=P_1-m\cdot a\\[3ex]F_R=m\cdot g\cdot \text{sin} (\alpha)-m\cdot a\\[3ex]F_R=6\cdot 10\cdot \text{sin}(45º)-6\cdot 4\\[3ex]F_R=18.43 \ N\end{ array}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-d8f2aff2a81d98ddcea04b1988282fda_l3.png "Rendered by QuickLaTeX.com")
Und sobald wir den Wert der Normalkraft und der Reibungskraft kennen, können wir den dynamischen Reibungskoeffizienten mithilfe der entsprechenden Formel bestimmen:

Dynamischer und statischer Reibungskoeffizient
Der Haftreibungskoeffizient ist der Reibungskoeffizient, der die Normalkraft und die Reibungskraft in Beziehung setzt, wenn die Bewegung beginnen soll (der Körper aber noch ruht).
Somit wird der Haftreibungskoeffizient zur Berechnung der Haftreibung verwendet, also der Reibungskraft, die überwunden werden muss, um eine Bewegung einzuleiten.
Normalerweise ist der dynamische Reibungskoeffizient kleiner als der statische Reibungskoeffizient. Die dynamische Reibungskraft ist daher auch geringer als die statische Reibungskraft.

Werte des dynamischen Reibungskoeffizienten
In der folgenden Tabelle sehen Sie einige gängige Werte des dynamischen Reibungskoeffizienten und des statischen Reibungskoeffizienten:
| Kontaktflächen | Haftreibungskoeffizient (μ e ) | Dynamischer Reibungskoeffizient ( μd ) |
|---|---|---|
| Kupfer auf Stahl | 0,53 | 0,36 |
| Stahl auf Stahl | 0,74 | 0,57 |
| Aluminium auf Stahl | 0,61 | 0,47 |
| Gummi auf Zement | 1 | 0,8 |
| Holz auf Holz | 0,25-0,5 | 0,2 |
| Holz auf Leder | 0,5 | 0,4 |
| Teflon oder Teflon | 0,04 | 0,04 |
Beachten Sie, dass diese Werte variieren können, da sie von vielen Faktoren wie Oberflächenrauheit, Temperatur usw. abhängen.