Dieser Artikel erklärt, was der Verschiebungsvektor in der Physik ist. So erfahren Sie, wie Sie den Verschiebungsvektor berechnen und außerdem eine gelöste Übung, um sich das Konzept richtig anzueignen.
Was ist der Verschiebungsvektor?
Der Verschiebungsvektor ist als der Vektor definiert, der von der Anfangsposition zur Endposition geht, das heißt, der Verschiebungsvektor ist der Vektor, der die Variation der Position eines Körpers darstellt. Der Verschiebungsvektor wird durch Subtrahieren des endgültigen Positionsvektors minus dem anfänglichen Positionsvektor berechnet.
Der Angriffspunkt des Verschiebungsvektors ist der Punkt, der die Anfangsposition des Körpers definiert, während das Ende des Verschiebungsvektors der Punkt ist, der die Endposition des Körpers angibt. In der Physik ist der Verschiebungsvektor also der Vektor, der die Differenz zwischen der Anfangsposition und der Endposition eines Körpers markiert.
Das Verschiebungsvektorsymbol ist

.
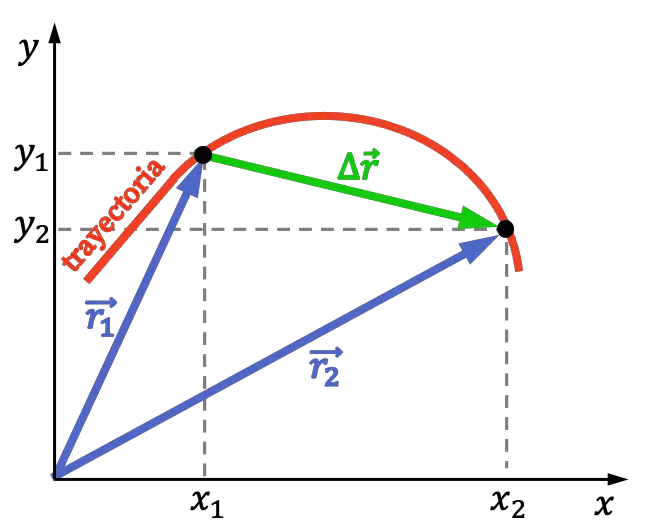
Beachten Sie, dass sich die Verschiebung von der Flugbahn unterscheidet. Die Trajektorie ist der gesamte vom beweglichen Körper zurückgelegte Weg, während der Verschiebungsvektor nur die Variation zwischen der Anfangsposition und der Endposition angibt.
Verschiebungsvektorformel
Der Verschiebungsvektor ist gleich der Differenz zwischen dem endgültigen Positionsvektor (r f ) und dem anfänglichen Positionsvektor (r i ). Daher wird der Verschiebungsvektor berechnet, indem der endgültige Positionsvektor minus dem anfänglichen Positionsvektor subtrahiert wird (Δr = r f – r i ).
Die Formel zur Berechnung des Verschiebungsvektors lautet daher wie folgt:

Bedenken Sie, dass jeder Positionsvektor zwei Komponenten hat, wenn wir in einem System mit zwei Koordinaten arbeiten. Um also die Subtraktion zweier Vektoren zu berechnen, müssen wir ihre Koordinaten subtrahieren:
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(x_f\vv{i }+y_f\vv{j}\right)-\left(x_i\vv{i}+y_i\vv{j}\right)\\[3ex]\Delta\vv{r}&=(x_f-x_i) \vv{i}+(y_f-y_i)\vv{j}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9de158fd25fcb5e34f8c8a8b2ea945ce_l3.png "Rendered by QuickLaTeX.com")
Gold:
-
ist der Verschiebungsvektor.
-

ist der Positionsvektor im letzten Moment.
-

ist der Ortsvektor zum Anfangszeitpunkt.
-

sind jeweils die X- und Y-Koordinaten der Endposition.
-

sind jeweils die X- und Y-Koordinaten der Ausgangsposition.
-

sind die Einheitsvektoren, die die Richtungen der OX- bzw. OY-Achsen darstellen.
Hinweis: Wenn wir im Raum arbeiten, haben die Vektoren drei Koordinaten. In diesem Fall muss die Z-Koordinate der Vektoren zur Formel hinzugefügt werden und mit drei Koordinaten gearbeitet werden.
Modul des Verschiebungsvektors
Der Betrag des Verschiebungsvektors ist der Abstand zwischen der Endposition und der Anfangsposition. Um den Abstand zwischen zwei Punkten zu bestimmen, muss daher der Verschiebungsmodul zwischen diesen beiden Punkten berechnet werden.
Die Norm des Verschiebungsvektors ist gleich der Quadratwurzel der Summe der Quadrate seiner Komponenten. Somit lautet die Formel zur Berechnung des Moduls des Verschiebungsvektors wie folgt:

Gold:
-

ist die Norm des Verschiebungsvektors.
-
sind jeweils die X- und Y-Koordinaten der Endposition.
-
sind jeweils die X- und Y-Koordinaten der Ausgangsposition.
Beachten Sie, dass der Abstand zwischen zwei Punkten, also die Größe des Verschiebungsvektors zwischen diesen Punkten, nicht mit der zurückgelegten Distanz übereinstimmt, da die zurückgelegte Distanz möglicherweise größer ist als die tatsächliche Distanz zwischen den beiden Punkten.
Beispiel für die Berechnung des Verschiebungsvektors
Nachdem wir die Definition des Verschiebungsvektors und seine Formel kennengelernt haben, werden wir in diesem Abschnitt anhand eines Beispiels, das Schritt für Schritt gelöst wird, sehen, wie der Verschiebungsvektor berechnet wird.
- Ein Teilchen befindet sich in der Position

im ersten Moment und nach einer Zeitspanne befindet es sich in der Position
 . Was ist der Verschiebungsvektor und der Abstand zwischen diesen beiden Positionen?
. Was ist der Verschiebungsvektor und der Abstand zwischen diesen beiden Positionen?
Um den Verschiebungsvektor zwischen der Endposition und der Anfangsposition zu bestimmen, subtrahieren Sie einfach die beiden Positionsvektoren:
![\begin{aligned}\Delta\vv{r}&=\vv{r_f}-\vv{r_i}\\[3ex]\Delta\vv{r}&=\left(5\vv{i }+1\vv{j}\right)-\left(3\vv{i}-2\vv{j}\right)\\[3ex]\Delta\vv{r}&=\bigl(5- 3\bigr)\vv{i}+\bigl(1-(-2)\bigr)\vv{j}\\[3ex]\Delta\vv{r}&=2\vv{i}+3\ vv{j}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-3444222027ce5b4d04745c6beaa286f5_l3.png "Rendered by QuickLaTeX.com")
Um dann den Abstand zwischen diesen beiden Punkten zu ermitteln, müssen wir die Norm des berechneten Verschiebungsvektors nehmen:
![\begin{aligned}|\Delta \vv{r}|&=\sqrt{2^2+3^2}}\\[3ex]|\Delta \vv{r}|&=\sqrt{ 4+9}\\[3ex]|\Delta \vv{r}|&=\sqrt{13}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-e1bf43dbb25c4179e4c8a79fddb56285_l3.png "Rendered by QuickLaTeX.com")
Verschiebungsvektor und Positionsvektor
Schließlich werden wir sehen, was der Unterschied zwischen dem Verschiebungsvektor und dem Positionsvektor ist, und wir werden auch sehen, welche Beziehung zwischen diesen beiden Arten von Vektoren besteht.
Der Ortsvektor , auch Positionsvektor genannt, ist ein Vektor, der die Lage eines Punktes relativ zu einem Bezugssystem beschreibt. In der Physik wird der Positionsvektor also verwendet, um die Position eines Punktes in einem Koordinatensystem anzugeben.
Folglich sind der Verschiebungsvektor und der Ortsvektor verknüpft , da der Ortsvektor einerseits die Position eines Punktes definiert und andererseits der Verschiebungsvektor die Variation des Ortsvektors zwischen zwei Zeitpunkten angibt.