Dieser Artikel erklärt, was lineare Bewegung in der Physik ist. So erfahren Sie, was die lineare Verschiebung bedeutet, wie man die lineare Verschiebung berechnet und zusätzlich eine Schritt-für-Schritt-Übung.
Was ist lineare Verschiebung?
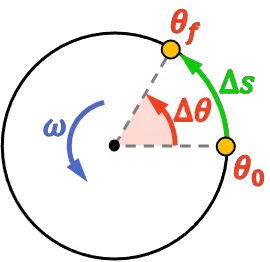
In der Physik ist die lineare Verschiebung die Strecke, die ein Körper bei kreisförmiger Bewegung zurücklegt. Mit anderen Worten ist die lineare Verschiebung die Länge, die ein Körper zurücklegt, wenn er eine Rotationsbewegung ausführt.
Im Allgemeinen wird in der Physik das Symbol Δs zur Darstellung einer linearen Verschiebung verwendet.
Die lineare Verschiebung wird in Längeneinheiten gemessen. Daher ist die Einheit der linearen Verschiebung im Système International (SI) das Meter.
Beachten Sie, dass sich in der Physik der Begriff der linearen Verschiebung vom Begriff der Verschiebung unterscheidet. Wenn wir von linearer Verschiebung sprechen, beziehen wir uns auf die Distanz, die bei einer kreisförmigen Bewegung zurückgelegt wird, während wir uns, wenn wir nur von Verschiebung sprechen, auf die Positionsänderung bei einer geradlinigen Bewegung beziehen. Um mehr zu erfahren, klicken Sie auf den folgenden Link:
Formel für lineare Verschiebung
Die lineare Verschiebung ist gleich der Winkelverschiebung (Δθ) multipliziert mit dem Krümmungsradius (r). Um die lineare Verschiebung zu berechnen, muss daher die Änderung der Winkelposition mit dem Radius des Kreisbewegungspfads multipliziert werden (Δs=Δθ·r).
Die Formel zur Berechnung der linearen Verschiebung lautet daher wie folgt:

Gold:
-

ist die lineare Verschiebung.
-

ist die Winkelverschiebung.
-

ist der Radius der Bahn der Kreisbewegung.
Lineare Bewegungsübung gelöst
Sobald wir die Definition der linearen Verschiebung und ihre Formel gesehen haben, sehen wir in diesem Abschnitt ein gelöstes Beispiel für ihre Berechnung.
- Ein Körper, der eine gleichmäßige Kreisbewegung mit dem Radius r=4 m ausführt, befindet sich zum Zeitpunkt t 0 =1 s in der Winkelposition θ 0 =35º und zum Zeitpunkt t f =5 s in der Winkelposition θ f = 80º. Berechnung:
- Die Winkelverschiebung des Körpers.
- Die lineare Bewegung des Körpers.
- Die Winkelgeschwindigkeit des Körpers.
Zunächst werden wir die Werte der Winkelpositionen in Bogenmaß umrechnen, um die Berechnungen in Einheiten des Internationalen Systems durchzuführen:


Um also die Winkelverschiebung des Körpers zu ermitteln, müssen wir die endgültige Winkelposition minus die anfängliche Winkelposition subtrahieren:
![\begin{aligned}\Delta\theta&=\theta_f-\theta_o\\[2ex]\Delta\theta&=1,40-0,61 \\[2ex]\Delta\theta&=0,79 \ rad \end{aligned}[ /latex] Maintenant que nous connaissons le déplacement angulaire, nous pouvons déterminer le déplacement linéaire en multipliant le déplacement angulaire par le rayon du mouvement circulaire : [latex]\begin{aligné}\Delta s&=\Delta\theta \cdot r\\[2ex]\Delta s&=0,79\cdot 4\\[2ex]\Delta s&=3,16 \ m\end {aligné}[ /latex] Enfin, nous appliquons la <a href="https://physigeek.com">formule de la vitesse angulaire</a> pour trouver sa valeur : [latex]\begin{aligned}\omega &=\cfrac{\Delta\theta}{\Delta t}\\[2ex] \omega &=\cfrac{0.79}{5-1}\\[2ex ]\ oméga &= 0,20 \ \cfrac{rad}{s}\end{aligned}“ title=“Rendered by QuickLaTeX.com“ height=“410″ width=“681″ style=“vertical-align: 0px;“></p></p>
</div><!-- .entry-content .clear -->
</div>
</article><!-- #post-## -->
<nav class=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-c8f156a7ba3367d3a36e2a68f72cd0ba_l3.png) Beitrags-Navigation
Beitrags-Navigation