Dieser Artikel erklärt, was der Ortsvektor in der Physik ist. So erfahren Sie Schritt für Schritt, welche Eigenschaften der Ortsvektor hat, wie man den Ortsvektor eines Punktes berechnet und auch ein konkretes Beispiel.
Was ist ein Ortsvektor?
Ein Positionsvektor , oder einfach Positionsvektor , ist ein Vektor, der die Position eines Punktes relativ zu einem Bezugssystem beschreibt. Das heißt, der Positionsvektor wird verwendet, um die Position eines Punktes in einem Koordinatensystem anzugeben.
Mathematisch ist der Positionsvektor eines Punktes als der Vektor definiert, der vom Koordinatenursprung zu diesem Punkt verläuft. Daher wird der Positionsvektor eines Punktes berechnet, indem die Koordinaten dieses Punktes abzüglich der Ursprungskoordinaten subtrahiert werden.

Im Allgemeinen wird der Positionsvektor durch die Einheitsvektoren ausgedrückt

,

Und
![\vv{k}[/latex ] , qui correspondent respectivement aux coordonnées des axes X, Y et Z. Par exemple, si les coordonnées cartésiennes d'un point sont (3,4,5), le vecteur position de ce point est r=3i+4j+5k.
<figure class="wp-block-image aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png" alt="vecteur de position" class="wp-image-7644" width="374" height="308" srcset="https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position-300x247.png 300w, https://physigeek.com/wp-content/uploads/2023/09/vecteur-de-position.png 697w" sizes="(max-width: 300px) 100vw, 300px"></figure>
<h2 class="wp-block-heading"><span class="ez-toc-section" id="Caracteristicas-del-vector-de-posicion"></span> Caractéristiques du vecteur de position<span class="ez-toc-section-end"></span></h2>
<p> Maintenant que nous connaissons la définition du vecteur position, voyons quelles sont ses caractéristiques.</p>
<ul style="color:#4fd12f; font-weight: bold;">
<li style="margin-bottom:20px"> <span style="color:#101010;font-weight: normal;">Le vecteur position d’un point est défini comme la différence entre les coordonnées de ce point et l’origine des coordonnées. Par conséquent, la formule pour calculer le vecteur position d’un point est la suivante :</span></li>
<p> [latex]\vv{r}=PO“ title=“Rendered by QuickLaTeX.com“ height=“438″ width=“1546″ style=“vertical-align: -5px;“></p>
</p>
<li style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-493ea824d13cdf2c289249ee201f0079_l3.png) Die Koordinaten des Ortsvektors eines Punktes werden durch die Einheitsvektoren ausgedrückt
Die Koordinaten des Ortsvektors eines Punktes werden durch die Einheitsvektoren ausgedrückt
,
Und
![\vv{k}[ /latex], qui représentent respectivement les directions des axes OX, OY et OZ.</span></li>
<p> [latex]\vv{r}=x\vv{i}+y\vv{j}+z\vv{k}“ title=“Rendered by QuickLaTeX.com“ height=“41″ width=“616″ style=“vertical-align: -5px;“></p>
<p> <span style=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-9a41deb220b0257eea947e8a946f9a2f_l3.png) Die Richtung des Ortsvektors ist die Linie, die den Ursprung der Markierung mit dem betrachteten Punkt verbindet.
Die Richtung des Ortsvektors ist die Linie, die den Ursprung der Markierung mit dem betrachteten Punkt verbindet.

Beachten Sie, dass der Positionsvektor nur zwei Koordinaten (x,y) hat, wenn wir in der Ebene arbeiten. Wenn wir andererseits im Raum arbeiten, hat der Positionsvektor drei Koordinaten (x,y,z).
Positionsvektorübung gelöst
Um das Konzept besser zu verstehen, finden Sie unten eine gelöste Übung zur Berechnung des Positionsvektors.
- Der Positions-Zeit-Vektor eines Körpers wird durch den folgenden Ausdruck definiert. Berechnen Sie den Positionsvektor des Körpers zum Zeitpunkt t=3 s und seinen Modul.

Um den Positionsvektor zum Zeitpunkt t=3 s zu finden, müssen Sie den Parameter t durch seinen Wert ersetzen und die Berechnungen durchführen:
![\begin{aligned}\vv{r}(3)&=4\cdot 3\vv{i}+2\cdot 3^2\vv{j}+5 \vv{k}\\[2ex ]\vv{r}(3)&=12\vv{i}+18\vv{j}+5\vv{k}\end{aligned}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-dec24ff071b35d8e731e7a0a66d6c0e0_l3.png "Rendered by QuickLaTeX.com")
Dann geben wir den Modul des Ortsvektors aus, indem wir die Quadratwurzel aus der Summe der Quadrate der Koordinaten berechnen:
![\begin{aligned}|\vv{r}(3)|&=\sqrt{12^2+18^2+5^2}\\[2ex]|\vv{r}(3)| &=\sqrt{493}\end{aligné}](https://physigeek.com/wp-content/ql-cache/quicklatex.com-8c09dc9fc6db4d03b23adfc1b44c8168_l3.png "Rendered by QuickLaTeX.com")
Positions- und Verschiebungsvektor
Der Versatz eines Punktes ist definiert als der Abstand zwischen dem Endpunkt und dem Startpunkt. Daher ist der Verschiebungsvektor der Vektor, der durch Subtraktion des endgültigen Positionsvektors minus dem anfänglichen Positionsvektor erhalten wird.

Daher besteht der Unterschied zwischen dem Positionsvektor und der Verschiebung darin, dass der Positionsvektor die Position eines Körpers zu einem bestimmten Zeitpunkt angibt, wohingegen der Verschiebungsvektor den Abstand zwischen zwei verschiedenen Positionen eines sich bewegenden Körpers angibt.
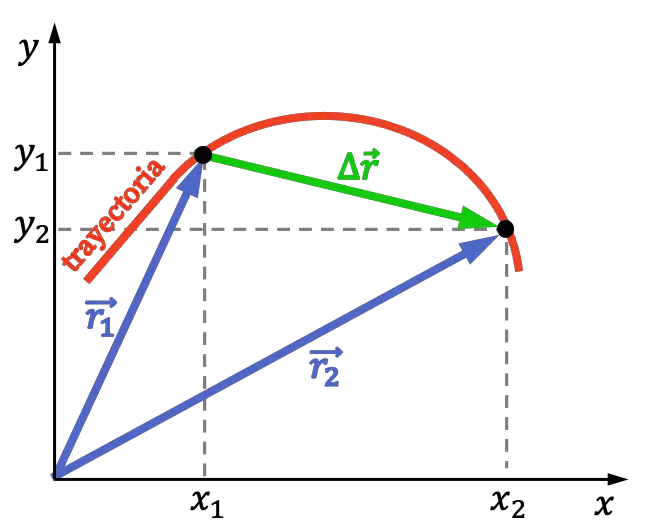
Ebenso muss der Streckenverlauf differenziert werden. Der Pfad bezieht sich auf die Gesamtlänge des zurückgelegten Pfades, während sich die Verschiebung auf die Entfernung von der Endposition zur Endposition bezieht. Der Weg kann daher größer sein als der Versatz.