本文解释了这些机制是什么以及它们的用途。因此,您将了解机制的含义、机制的示例以及机制的不同类型。
什么是机制?
机构是一组机械元件,可以让人类更省力、更舒适地完成工作。
更准确地说,机构是借助传动系统来转换力或运动的装置。
因此,机械装置的功能是促进人类的工作,因为机械装置用于产生力或运动,如果没有机械装置,这些力或运动将非常困难甚至不可能。

例如,汽车的机械系统允许通过踩下油门和移动变速杆来向前移动。因此,车辆机构将人类所做的功转化为向前运动。
简而言之,机构是机器的一组部件,可将输入力或运动转换为所需的输出力或运动。
机制示例
一旦我们了解了机制的定义,我们将看到几个机制的示例,以更好地理解该概念。
- 连杆曲柄机构:用于将直线运动转换为圆周运动或将圆周运动转换为直线运动的机构。
- 凸轮从动机构:一种不可逆机构,可将旋转运动转换为振荡线性运动。
- 蜗杆机构:用于在两个垂直轴之间传递旋转运动的机构。
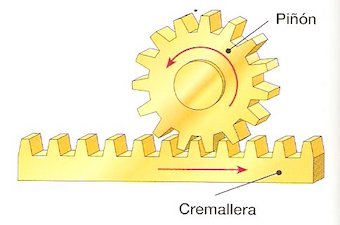
- 齿条和小齿轮机构:可逆机构,允许您从圆周运动切换到线性运动。
- 摩擦轮:通过摩擦传递旋转运动的机构。
- 提升机:由一组滑轮组成的机构,可以轻松地搬运重物。
- 链轮:用于在两轴之间传递角速度和动力的机构。
机制类型
直线传动机构
线性传动机构是那些施加线性运动并响应地产生另一个线性运动的机构。因此,这种类型的机构传递直线运动。
例如,杠杆是一种线性传动机构,因为其操作包括向下移动其一端(线性运动),因此,带有负载的杠杆的另一臂向上移动(线性运动)。因此,它是一种传递线性运动的机构。
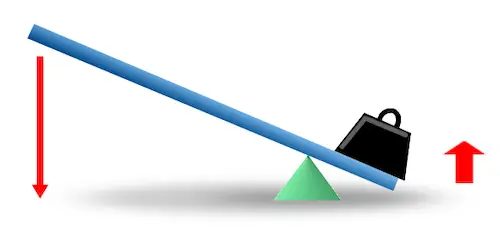
一般来说,这种类型的机构允许修改输入力,从而允许施加比所施加的力大得多的力。按照前面的示例,与在没有机械仪器的情况下举起重物相比,秤可以让您用更小的力举起重物。
循环传动机构
圆形传动机构是那些在输入处具有圆周运动并且在输出处也具有圆周运动的机构。因此,这种类型的机构传递旋转运动。
因此,圆形驱动机构和线性驱动机构之间的区别仅在于它们传递的运动类型。圆形传动机构传递旋转运动,而直线传动机构传递直线运动。
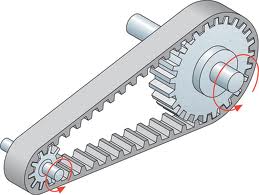
例如,通过皮带连接的滑轮系统是圆形传动机构,因为输入滑轮的旋转运动被传递到输出滑轮。

此类机构具有修改角速度的功能,使得在传递圆周运动时,适当增大或减小旋转速度。
为此,我们调整输入轮的直径和输出轮的直径:如果输入直径大于输出直径,则角速度会增加,反之,如果入口直径较小大于出口直径,角速度减小。
带链条的链轮,称为链轮机构,也是一种循环传动机构。链条的优点是效率更高,但灵活性不如皮带。
最后,齿轮也是圆周传动机构,因为它们是齿啮合在一起的齿轮,因此,圆周运动从一个轮传递到另一个轮。
齿轮主要有三种类型:轴线平行的直齿轮、轴线垂直的锥齿轮和齿为斜线的斜齿轮。
正齿轮

锥齿轮

斜齿轮

运动变换机制
运动变换机制将输入运动转换为另一种类型的运动,因此输入运动和输出运动是不同的。
基本上,这些类型的机构将圆周运动转换为线性运动,或者相反,它们将圆周运动转换为线性运动。
例如,凸轮从动件机构用于将圆周运动转变为往复直线运动。这种类型的机制是不可逆的,这意味着它允许您从圆周运动变为直线运动,但不能相反。
类似地,齿轮齿条机构用于将向前运动转换为旋转运动。这种类型的机构是可逆的,因此它还允许您将圆周运动转换为线性运动。
机构的机械优势
机构的机械效益是机构的输出力与输入力的比率。因此,机械效益等于输出力与输入力之比。
因此,机构机械效益的计算公式如下:

机构的机械效益也可以通过将施加的力的速度除以负载移动的速度来计算。同样,该表达式也等于施加力点的位移除以载荷的位移:

金子:
-

是机械优势。
-

是输出力。
-

是输入力。
-

是输入速度。
-

是退出速度。
-

是条目经过的距离。
-

是输出行进的距离。
另一方面,如果我们想传递力矩而不是力,则通过将输出力矩除以输入力矩来计算机械优势。例如,齿轮的机械效益是通过传递力矩的比率来衡量的。

金子:
-
是机械优势。
-

是释放时间。
-

是进入时间。
-

是输入角速度。
-

是退出角速度。
那么,根据机械效益公式,可以推导出以下关系:
- VM>1 :输出力大于施加的力,因此机构增加力的大小。另一方面,负载行进的距离小于施加力的点行进的距离。
- VM<1 :输出力小于施加力,因此机构减小力值。然而,我们获得的负载位移大于力施加点处产生的位移。
- VM=1 :机构的输出力等于施加在其上的力。负载的位移和力的作用点也相同。尽管这些类型的机构没有提供机械优势,但它们通常用于更舒适地施加力量。例如,一个简单的滑轮允许向下的力来提升重物,从而更容易提升负载。
机构的自由度
机构的自由度是完全定义机构的运动状态所需的广义速度的数量。
因此,机构的自由度数可以使用以下公式计算:

金子:
-

是机构的自由度数。
-

是构成机构的实体或元件的数量。
-

是每个实体的自由度数。如果我们在二维中研究机制,每个实体都有 3 个自由度,但如果我们在三个维度中研究,每个实体有 6 个自由度。
-

是链路k施加的约束数量。
应该注意的是,机构的自由度是定义其运动的重要参数,因为它们与描述其运动所需的方程数量一致。