本文解释什么是平衡条件。您将找到两种平衡条件的真实示例,此外,您将能够通过逐步解决的练习进行训练。
平衡条件是什么?
在物理学中,平衡条件表明,如果施加在物体上的力和力矩的总和为零,则物体处于平衡状态。
所以平衡有两个条件:第一个条件是合力必须为零,第二个条件是合力矩必须为零。
请记住,要使系统处于平衡状态,必须满足两个方程,仅满足一个条件是不够的。
平衡的首要条件
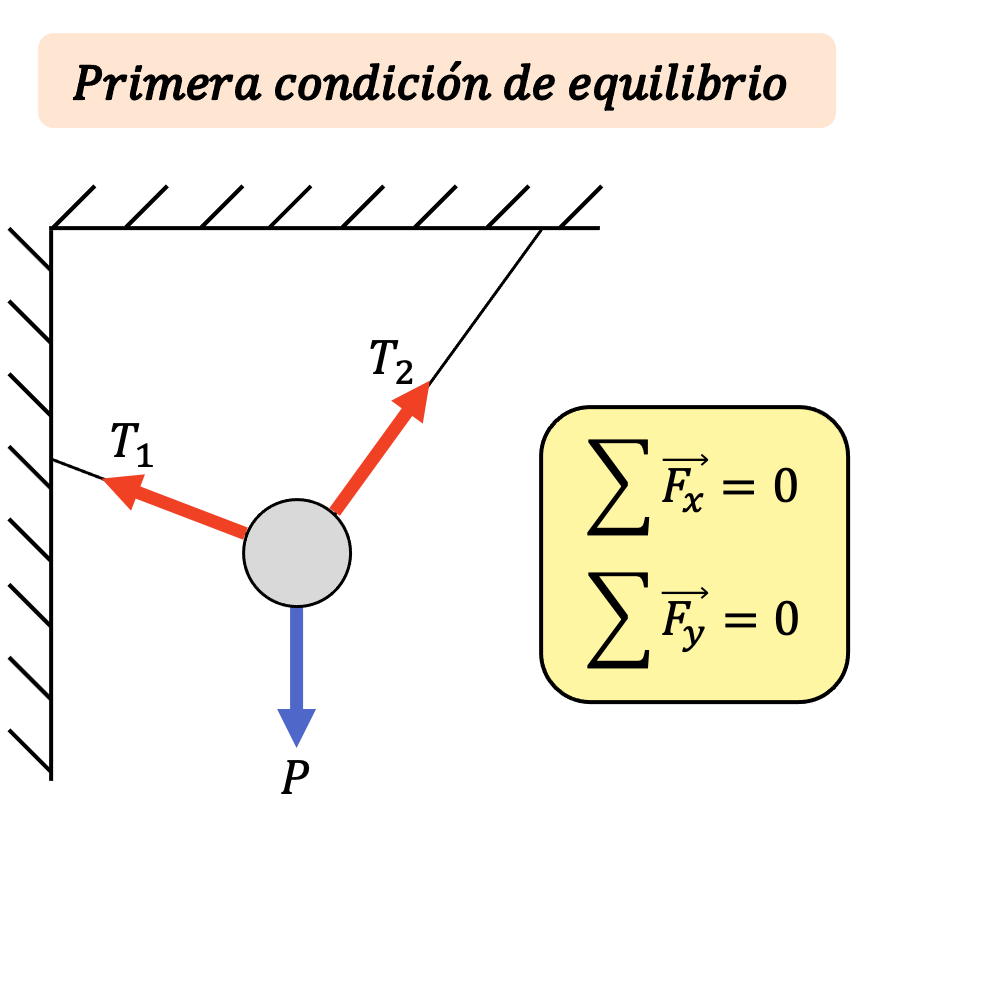
第一个平衡条件表示,施加到物体上的力的总和必须等于零,以使所述物体处于平移平衡。
从逻辑上讲,所有三个轴的力之和必须为零,如果在任何轴上都不满足,则身体不平衡。

此外,如果力的总和为零,则意味着物体没有线性加速度。因此,处于平移平衡的物体可以处于静止状态(零速度)或以恒定线速度移动。
从这里,可以区分两种类型的翻译平衡:
- 静态平移平衡:当满足第一个平衡条件并且物体也处于静止状态时。
- 动态平移平衡:当满足第一个平衡条件并且物体具有恒定速度(不同于零)时。
第二个平衡条件
第二平衡条件与第一平衡条件类似,但使用力矩而不是力。
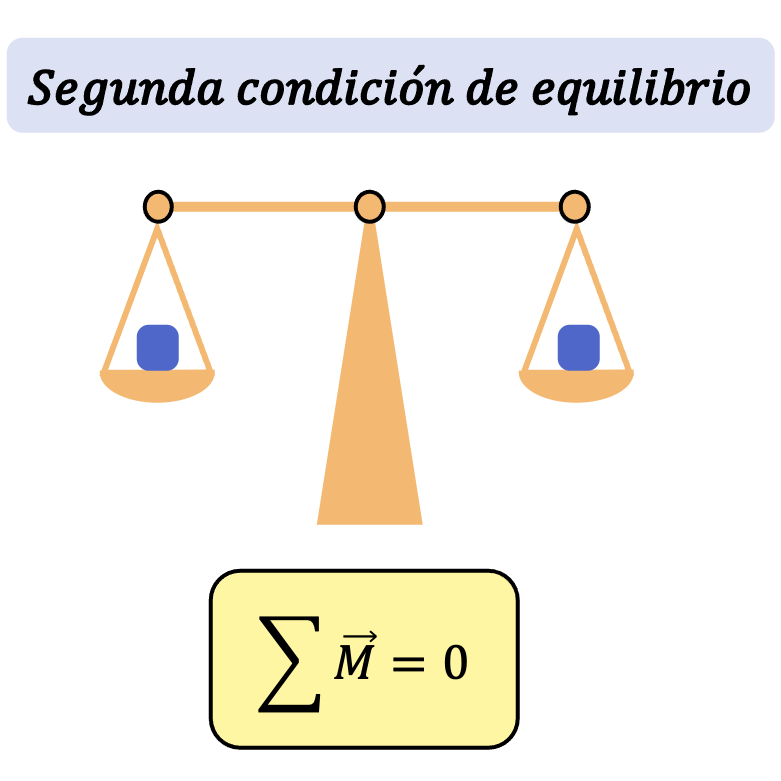
第二个平衡条件表示,如果物体的力矩总和为零,则物体处于旋转平衡。
同样,框架所有轴上的力矩总和必须为零,否则无法验证第二个平衡条件。

请记住,力在一点上的力矩(或扭矩)是通过将力的值乘以力到该点的垂直距离来计算的。

类似地,为了满足第二个平衡条件,物体的角加速度必须为零,这意味着在这种状态下物体不旋转或以恒定角速度旋转。
平衡条件的例子
看完这两个平衡条件的定义后,您将能够看到下面几个日常生活中的例子来充分理解这个概念。
例如,当身体悬挂在天花板上时,身体处于平衡状态,因为系统完全静止。我们也可以说系统处于静态平衡。
日常生活中平衡条件的另一个例子是秤。当平衡臂稳定并停止旋转时,系统处于静止状态,因此也处于平衡状态。
解决了平衡条件问题
练习1
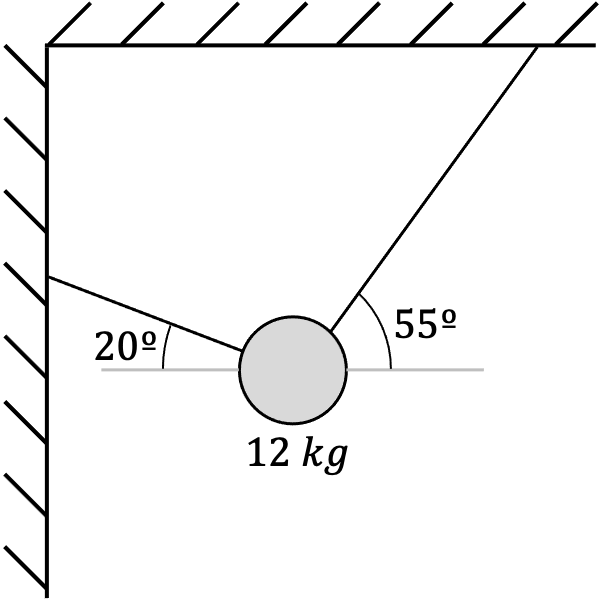
给定一个质量为 12 kg 的刚体,由两根绳子悬挂,其角度如下图所示,计算每根绳子必须施加的力才能保持刚体保持平衡。
解决这类问题我们首先要做的是画出人物的自由体图:
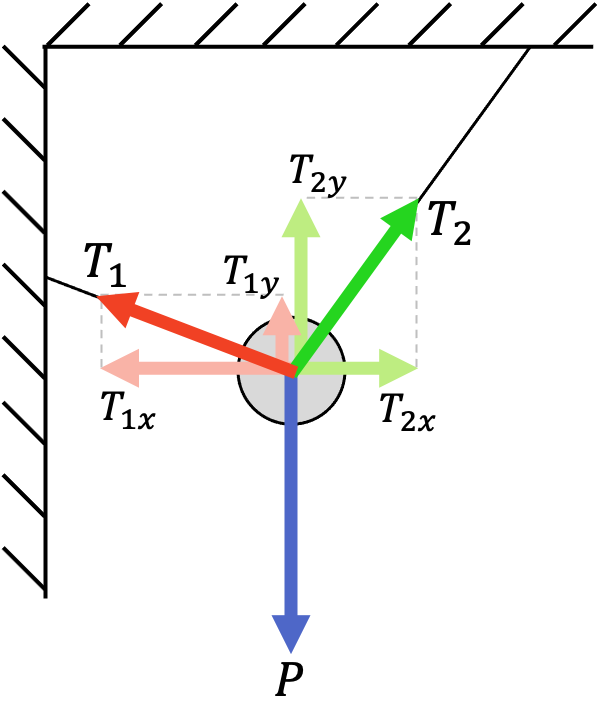
请注意,实际上只有三个力作用在悬挂的物体上,即重量 P 的力和弦的张力 T 1和 T 2 。 T 1x 、T 1y 、T 2x和T 2y表示的力分别是T 1和T 2的矢量分量。
因此,由于我们知道弦的倾斜角度,我们可以找到张力矢量分量的表达式:




另一方面,我们可以通过应用重力公式来计算重物的力:

问题陈述告诉我们,物体处于平衡状态,因此垂直力的总和与水平力的总和必须等于零。因此我们可以建立力方程并将其设置为零:


现在,我们用之前找到的表达式替换约束的组成部分:


最后,我们求解方程组以获得力 T 1和 T 2的值:
![\left.\begin{array}{l}-T_1\cdot 0,94+T_2\cdot 0,57=0\\[2ex]T_1\cdot 0,34+T_2\cdot 0,82-117 .72=0\end{array }\right\} \longrightarrow \ \begin{array}{c}T_1=69,56 \ N\\[2ex]T_2=114,74 \ N\end{array}[/ latex]
<div class="wp-block-otfm-box-spoiler-end otfm-sp_end"></div>
<h3 class="wp-block-heading"> Exercice 2</h3>
<p> Calculer le moment que doit faire le support de la poutre suivante pour qu’elle soit en équilibre de rotation : </p>
<div class="wp-block-image">
<figure class="aligncenter size-full is-resized"><img decoding="async" loading="lazy" src="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png" alt="Exercice résolu de la deuxième condition d'équilibre" class="wp-image-397" width="237" height="203" srcset="https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre-300x257.png 300w, https://physigeek.com/wp-content/uploads/2023/09/exercice-resolu-deuxieme-condition-dequilibre.png 643w" sizes="(max-width: 300px) 100vw, 300px"></figure>
</div>
<div class="wp-block-otfm-box-spoiler-start otfm-sp__wrapper otfm-sp__box js-otfm-sp-box__closed otfm-sp__FFF8E1" role="button" tabindex="0" aria-expanded="false" data-otfm-spc="#FFF8E1" style="text-align:center">
<div class="otfm-sp__title"> <strong>Voir la solution</strong></div>
</div>
<p> Pour que la poutre soit en équilibre de rotation et que la deuxième condition d’équilibre soit donc remplie, le support doit contrecarrer le moment de torsion généré par la force, donc la somme des moments sera nulle. On calcule donc le moment (ou couple) généré par la force au niveau de l’appui : [latex]M_{force}=13\cdot 9 = 117 \ Nm” title=”Rendered by QuickLaTeX.com” height=”343″ width=”3353″ style=”vertical-align: 0px;”></p>
</p>
<p class=](https://physigeek.com/wp-content/ql-cache/quicklatex.com-694655a52049a536489cebbaef3bc7a2_l3.png) 现在我们列出力矩平衡方程:
现在我们列出力矩平衡方程:

产生力的力矩通过屏幕内部,因此其符号为负:

最后,我们求解方程中的未知数:

所获得的时刻具有正号,因此其意义在屏幕之外。
练习3
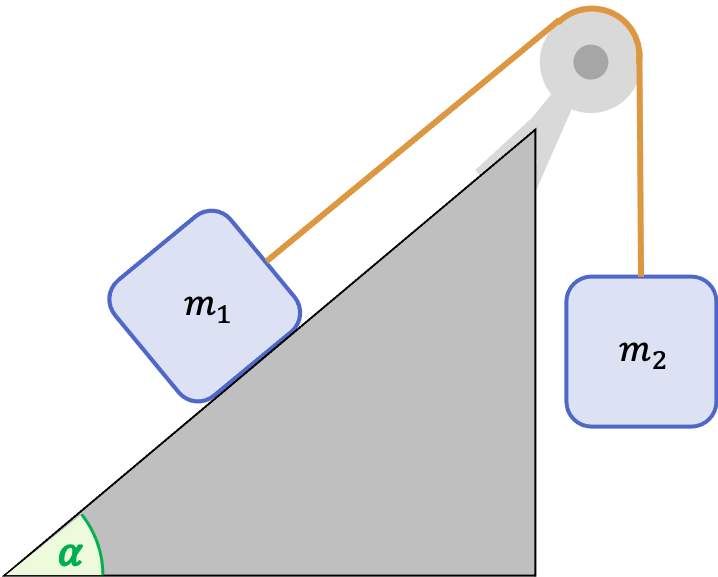
如下图所示,两个物体通过一根绳子和一个质量可以忽略不计的滑轮连接起来。如果物体 2 的质量为 7 kg,斜坡的斜率为 50°,则计算物体 1 的质量,使整个系统处于平衡状态。在这种情况下,摩擦力可以忽略不计。
物体 1 位于倾斜的斜坡上,因此首先要做的是将其重量的力矢量化,使力作用在斜坡的轴上:


因此,作用在整个系统上的力集为:
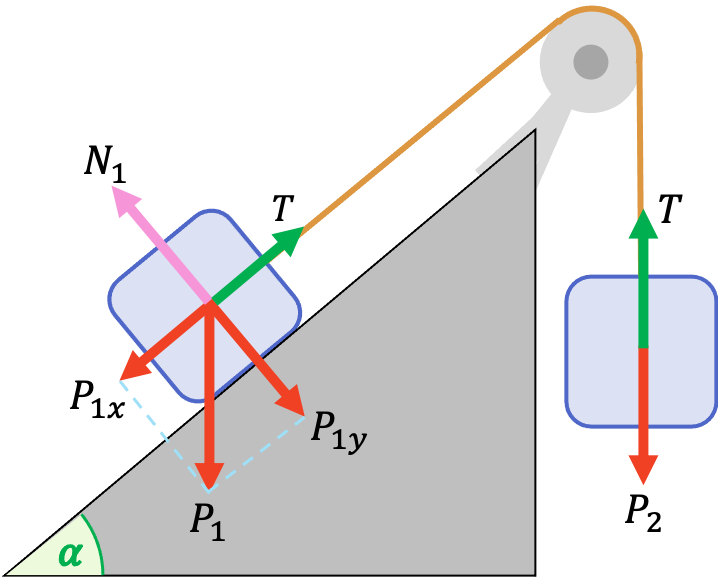
问题陈述告诉我们,力系统处于平衡状态,因此两个物体必须处于平衡状态。根据这些信息,我们可以制定两个物体的平衡方程:
![1\ \rightarrow \ \begin{cases}P_{1x}=T\\[2ex]P_{1y}=N\end{cases} \qquad\qquad 2 \ \rightarrow \ T=P_2[/latex ] Ainsi, la composante du poids de l'objet 1 incliné dans le sens de la pente doit être égale au poids de l'objet 2 : [latex]P_{1x}=P_2](https://physigeek.com/wp-content/ql-cache/quicklatex.com-ed082b4f064316ab20fb0d26054d3010_l3.png "Rendered by QuickLaTeX.com")

现在我们应用重力公式并简化方程:


最后,我们替换数据并求解物体 1 的质量:



练习4
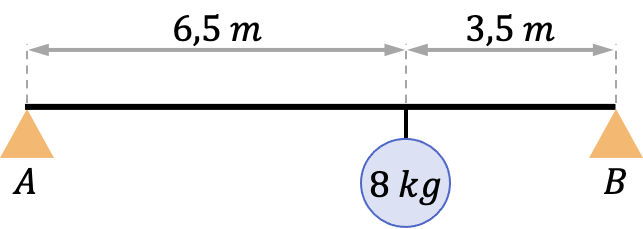
如下图所示,一根 10 m 的单杠支撑着一个质量为 8 kg 的物体。知道支架和悬浮体之间的距离,如果系统处于旋转和平移平衡,支架施加的力是多少?
首先,我们使用重力公式来计算单杠必须支撑的重量:

因此,系统的自由体图为:
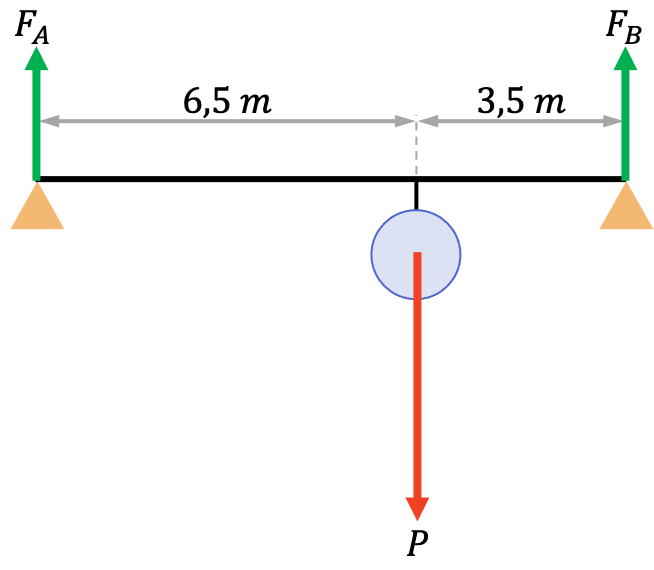
问题陈述告诉我们系统处于力平衡状态,因此所有这些力的总和必须为零。利用这个平衡条件,我们可以制定以下方程:

另一方面,该陈述也告诉我们系统处于动量平衡状态。因此,如果我们考虑系统中任意点的力矩总和,结果必定为零,如果我们采用两个支撑之一的参考点,我们将得到一个具有单个未知数的方程:


现在我们可以通过求解方程中的未知数来计算支撑 B 施加的力:



最后,我们可以通过将获得的值代入垂直力的方程来知道施加在另一个支撑上的力的强度:

